
基于标定板的手眼标定
创始人
2025-06-01 07:15:18
基于标定板的手眼标定
dev_update_off ()
*相机初始化参数
ImageNameStart := ‘./calib_pics_’
*机器人姿态
PoseDataStart := ‘./cal_robot_pose_’
NumImages := 10
- 读取图片,为后续打开窗口提供尺寸
read_image (Image, ImageNameStart + ‘00’)
dev_close_window ()
get_image_size (Image, Width, Height)
dev_open_window (0, 0, Width/2, Height/2, ‘black’, WindowHandle)
dev_set_line_width (2)
dev_set_draw (‘margin’)
dev_display (Image)
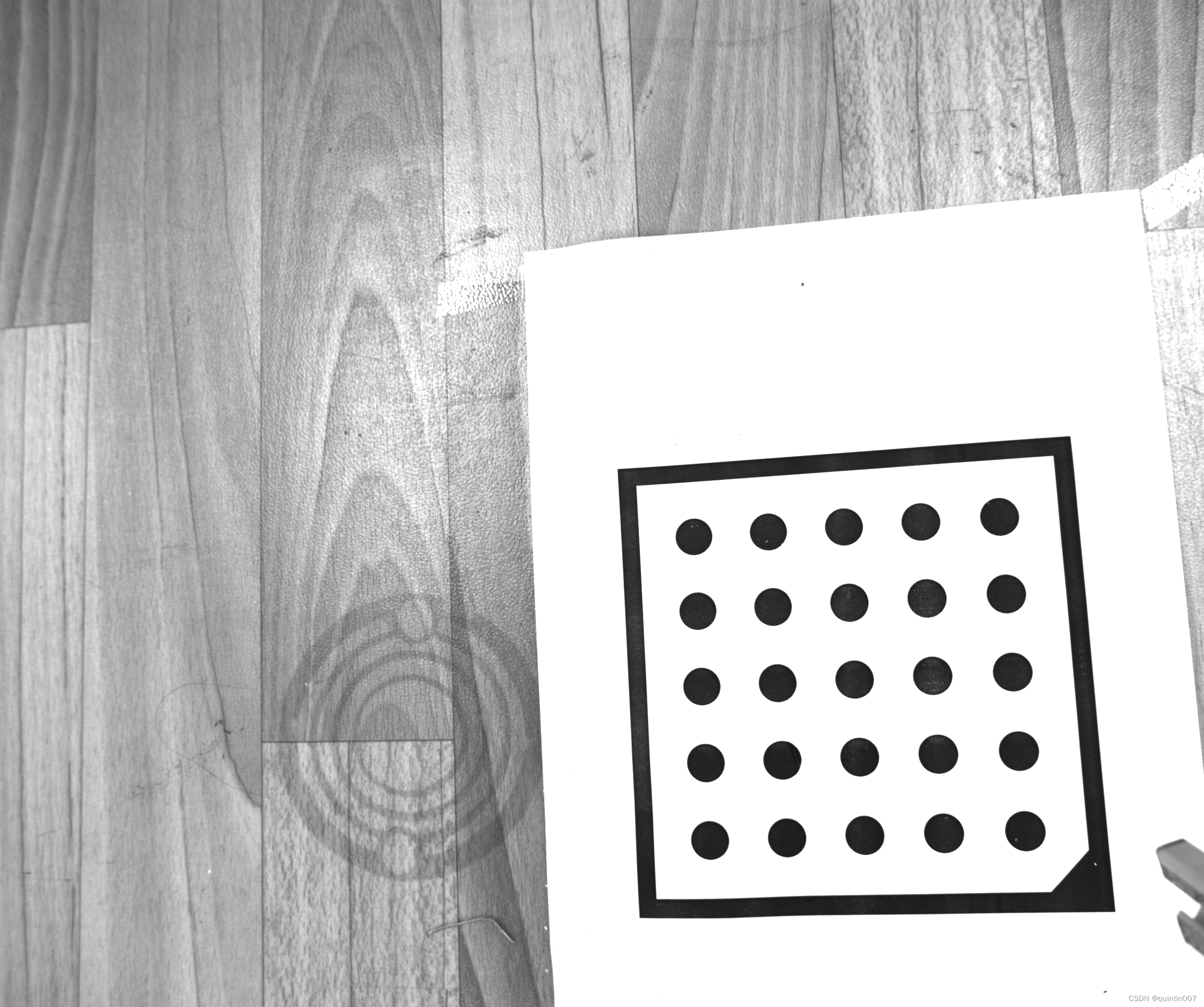
set_display_font (WindowHandle, 14, ‘mono’, ‘true’, ‘false’) - 读取标定板信息
CalTabFile := ‘./caltab-155.descr’ - 设置相机初始参数
StartCamParam := [0.008,0,3.45e-006,3.45e-006,1224,1024,2448,2048] - 创建标定模型
create_calib_data (‘hand_eye_moving_cam’, 1, 1, CalibDataID) - 设置相机信息
set_calib_data_cam_param (CalibDataID, 0, ‘area_scan_divi
下一篇:#好山好水好心情 走,看山看水
相关内容
热门资讯
原创 炸...
在烹饪的世界里,带鱼以其独特的风味和丰富的营养价值,成为了众多美食爱好者的心头好。然而,如何让炸带鱼...
史上最长春节假期开启,这三大文...
“史上最长春节假期”开启,预计全社会95亿人次跨区域流动创下的历史新高。在这个“最热春节”里,文旅消...
@上虞人,来晒年夜饭啦!看看谁...
俗话说:宁可穷一年,不能穷一餐 打一千、骂一万 不要忘了三十晚上这顿饭 这是什么意思呢? 说的就是一...
中佰康:年夜饭菜单提前定!这几...
年夜饭,是一年中最温馨、最隆重的团圆饭。精心准备几道硬菜,不仅是对家人一年辛苦的慰藉,更是团聚时刻的...