
【Bezier + BSpline + CatmullRom】移动机器人曲线路径规划
问题:现有n+1n+1n+1个2维的离散点Pi=(xi,yi),(i=0,1,⋯,n){P_i} = \left( {{x_i},{y_i}} \right),\left( {i = 0,1, \cdots ,n} \right)Pi=(xi,yi),(i=0,1,⋯,n), 如何用Pi{P_i}Pi拟合一条平滑的曲线,最后将曲线分割成数条 2阶/3阶贝塞尔曲线,并保证这数条曲线段拼接处是连续的,即全局可导。
| 2阶Bezier | 3阶Bezier |
|---|---|
 |  |
1 Bezier路径拟合
1.1 Bezier曲线绘制原理
Bezier曲线有两个简单的规律:
1、k阶的Bezier曲线需要用到k+1个数据点。 如: 3阶Bezier曲线需要用到4个数据点。
2、Berzier曲线只保证经过起点和终点,不保证经过中间所有的控制点。Berzier曲线用到的第1个数据点和倒数第1个数据点分别被称为起点和终点,中间的所有数据被称为控制点。
关注Pi{P_i}Pi的4个数据点:
P0=(x0,y0),P1=(x1,y1),P2=(x2,y2),P3=(x3,y3){P_0} = \left( {{x_0},{y_0}} \right),{P_1} = \left( {{x_1},{y_1}} \right),{P_2} = \left( {{x_2},{y_2}} \right),{P_3} = \left( {{x_3},{y_3}} \right)P0=(x0,y0),P1=(x1,y1),P2=(x2,y2),P3=(x3,y3)
定义向量t≜0:δt:1t \triangleq 0:\delta t:1t≜0:δt:1(这是MatLAB的写法, δt\delta tδt决定曲线绘制精度)。
1阶、2阶、3阶和n阶的Bezier曲线公式分别如下:
B1st=(1−t)P0+tP1B2nd=(1−t)2P0+2(1−t)tP1+t2P2B3rd=(1−t)3P0+3(1−t)2tP1+3(1−t)t2P2+t3P3Bnth=∑i=0na(i)⋅(1−t)b(i)⋅tc(i)⋅Pi(1)\begin{aligned}{B_{1st}} &= \left( {1 - t} \right){P_0} + t{P_1}\\ {B_{2nd}} &= {\left( {1 - t} \right)^2}{P_0} + 2\left( {1 - t} \right)t{P_1} + {t^2}{P_2}\\ {B_{3rd}} &= {\left( {1 - t} \right)^3}{P_0} + 3{\left( {1 - t} \right)^2}t{P_1} + 3\left( {1 - t} \right){t^2}{P_2} + {t^3}{P_3}\\ {B_{nth}} &= \sum\limits_{i = 0}^n {a\left( i \right) \cdot {{\left( {1 - t} \right)}^{b\left( i \right)}} \cdot {t^{c\left( i \right)}} \cdot {P_i}}\end{aligned} \tag{1}B1stB2ndB3rdBnth=(1−t)P0+tP1=(1−t)2P0+2(1−t)tP1+t2P2=(1−t)3P0+3(1−t)2tP1+3(1−t)t2P2+t3P3=i=0∑na(i)⋅(1−t)b(i)⋅tc(i)⋅Pi(1)
其中,
{a(i)=n+1阶杨辉三角第n+1行的第i+1列的数b(i)=n−i;c(i)=i\left\{ \begin{aligned} a\left( i \right) &= {\text{ }}n + 1 阶杨辉三角第n+1行的第i+1列的数 \\ b\left( i \right) &= n - i;c\left( i \right) = i \\ \end{aligned} \right.{a(i)b(i)= n+1阶杨辉三角第n+1行的第i+1列的数=n−i;c(i)=i
下面给出计算n+1n+1n+1阶杨辉三角矩阵的Matlab代码
clear all; close all; clc;
n = 5;
YH = zeros(n+1,n+1);
for i = 1:1:n+1YH(i,1) = 1; % 第1列元素YH(i,i) = 1; % 对角线元素
endfor i = 3:1:n+1 % 从第三行开始,因为前两行都是1for j = 2:1:i-1 % 第1列和第i列已经都被赋值为1了YH(i,j) = YH(i-1,j-1) + YH(i-1,j);end
enda = YH(n+1,:) % 取n+1行作为系数% 运行结果
% n = 0; 1
% n = 1; 1 1
% n = 2; 1 2 1
% n = 3; 1 3 3 1
% n = 4; 1 4 6 4 1
% n = 5; 1 5 10 10 5 1
1.2 基于Bezier曲线的路径拟合实验
2阶Bezier曲线绘制如下:

3阶Bezier曲线绘制如下:

n阶-Bezier曲线绘制如下 (n = 10)

实验结果分析:
1、对于n+1n+1n+1个离散数据点,用nnn阶的Bezier曲线来路径拟合并不是一个好的选择,很明显,上图的拟合效果很差;
2、用nnn阶Bezier曲线路径拟合会导致运算量暴增,阶次爆炸。
3、除计算量问题外,根据Bezier本身的原理,我们也是无法直接把nnn阶Bezier分割成多个2阶/3阶的贝塞尔曲线的。
要解决本文所提问题,我们只能通过其他的曲线拟合方法先实现路径拟合,然后再把它分割转换成2阶/3阶贝塞尔曲线的描述方式。下面将会介绍BSpline和Catmull_ROM两种曲线拟合方法。
2 BSpline路径拟合-分段拼接
通过调研发现,用BSpline曲线来拟合路径,是可以采用分段拼接的方式的,而且它可以保证拼接处是连续的,即全局可导。
2.1 Bspline曲线绘制原理
BSpline曲线有两个简单的规律:
1、k阶的BSpline曲线需要用到k+1个数据点。 如: 3阶BSpline曲线需要用到4个数据点。
2、BSpline曲线的特点是不经过任何数据点(这让我觉得用这个东西搞路径拟合有点离谱)
关注Pi{P_i}Pi的4个数据点:
P0=(x0,y0),P1=(x1,y1),P2=(x2,y2),P3=(x3,y3){P_0} = \left( {{x_0},{y_0}} \right),{P_1} = \left( {{x_1},{y_1}} \right),{P_2} = \left( {{x_2},{y_2}} \right),{P_3} = \left( {{x_3},{y_3}} \right)P0=(x0,y0),P1=(x1,y1),P2=(x2,y2),P3=(x3,y3)
定义向量t≜0:δt:1t \triangleq 0:\delta t:1t≜0:δt:1(这是MatLAB的写法, δt\delta tδt决定曲线绘制精度)。
2阶BSpline拟合公式:
{a0=12(x0+x1)a1=x1−x0a2=12(x0−2x1+x2),{b0=12(y0+y1)b1=y1−y0b2=12(y0−2y1+y2)(2)\left\{ \begin{aligned} {a_0} &= \frac{1}{2}\left( {{x_0} + {x_1}} \right) \\ {a_1} &= {x_1} - {x_0} \\ {a_2} &= \frac{1}{2}\left( {{x_0} - 2{x_1} + {x_2}} \right) \\ \end{aligned} \right.,\left\{ \begin{aligned} {b_0} &= \frac{1}{2}\left( {{y_0} + {y_1}} \right) \\ {b_1} &= {y_1} - {y_0} \\ {b_2} &= \frac{1}{2}\left( {{y_0} - 2{y_1} + {y_2}} \right) \\ \end{aligned} \right.\tag{2}⎩⎨⎧a0a1a2=21(x0+x1)=x1−x0=21(x0−2x1+x2),⎩⎨⎧b0b1b2=21(y0+y1)=y1−y0=21(y0−2y1+y2)(2)
B(t)=(x(t),y(t))⇒{x(t)=a0+a1t+a2t2y(t)=b0+b1t+b2t2(3)B\left( t \right) = \left( {x\left( t \right),y\left( t \right)} \right) \Rightarrow \left\{ \begin{aligned} x\left( t \right) &= {a_0} + {a_1}t + {a_2}{t^2} \\ y\left( t \right) &= {b_0} + {b_1}t + {b_2}{t^2} \\ \end{aligned} \right.\tag{3}B(t)=(x(t),y(t))⇒{x(t)y(t)=a0+a1t+a2t2=b0+b1t+b2t2(3)
3阶BSpline拟合公式:
{a0=16(x0+4x1+x2)a1=−12(x0−x2)a2=12(x0−2x1+x2)a3=−16(x0−3x1+3x2−x3),{b0=16(y0+yx1+y2)b1=−12(y0−y2)b2=12(y0−2y1+y2)b3=−16(y0−3y1+3y2−y3)(4)\left\{ \begin{aligned} {a_0} &= \frac{1}{6}\left( {{x_0} + 4{x_1} + {x_2}} \right) \\ {a_1} &= - \frac{1}{2}\left( {{x_0} - {x_2}} \right) \\ {a_2} &= \frac{1}{2}\left( {{x_0} - 2{x_1} + {x_2}} \right) \\ {a_3} &= - \frac{1}{6}\left( {{x_0} - 3{x_1} + 3{x_2} - {x_3}} \right) \\ \end{aligned} \right.,\left\{ \begin{aligned} {b_0} &= \frac{1}{6}\left( {{y_0} + y{x_1} + {y_2}} \right) \\ {b_1} &= - \frac{1}{2}\left( {{y_0} - {y_2}} \right)\\ {b_2} &= \frac{1}{2}\left( {{y_0} - 2{y_1} + {y_2}} \right) \\ {b_3} &= - \frac{1}{6}\left( {{y_0} - 3{y_1} + 3{y_2} - {y_3}} \right) \\ \end{aligned} \right.\tag{4}⎩⎨⎧a0a1a2a3=61(x0+4x1+x2)=−21(x0−x2)=21(x0−2x1+x2)=−61(x0−3x1+3x2−x3),⎩⎨⎧b0b1b2b3=61(y0+yx1+y2)=−21(y0−y2)=21(y0−2y1+y2)=−61(y0−3y1+3y2−y3)(4)
B(t)=(x(t),y(t))⇒{x(t)=a0+a1t+a2t2+a3t3y(t)=b0+b1t+b2t2+b3t3(5)B\left( t \right) = \left( {x\left( t \right),y\left( t \right)} \right) \Rightarrow \left\{ \begin{aligned} x\left( t \right) &= {a_0} + {a_1}t + {a_2}{t^2} + {a_3}{t^3} \\ y\left( t \right) &= {b_0} + {b_1}t + {b_2}{t^2} + {b_3}{t^3} \\ \end{aligned} \right.\tag{5}B(t)=(x(t),y(t))⇒{x(t)y(t)=a0+a1t+a2t2+a3t3=b0+b1t+b2t2+b3t3(5)
2.2 Bspline分段拼接方法
假设现在有待拟合的n+1个离散点Pi=(xi,yi),(i=0,1,⋯,n){P_i} = \left( {{x_i},{y_i}} \right),\left( {i = 0,1, \cdots ,n} \right)Pi=(xi,yi),(i=0,1,⋯,n) ,采用2阶BSpline分段拼接拟合过程如下:
以P0,P1,P2{P_0},{P_1},{P_2}P0,P1,P2为控制点绘制第1条2阶BSpline
以P1,P2,P3{P_1},{P_2},{P_3}P1,P2,P3为控制点绘制第2条2阶BSpline
…
以Pn−2,Pn−1,Pn{P_{n-2}},{P_{n-1}},{P_{n}}Pn−2,Pn−1,Pn为控制点绘制第n-1条2阶BSpline
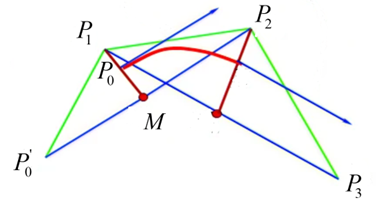
由于BSpline曲线不经过任何控制点,我们想让它经过第一个控制P0P_0P0和最后一个PnP_ nPn控制点 ,则需要修改P0P_0P0和PnP_ nPn。 注意2阶BSpline曲线与控制点相连线段相切于其中点。
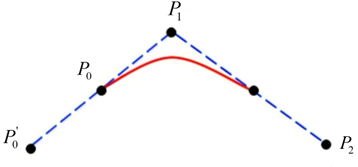 |  |
|---|
P1−P0=P0−P0′⇒P0′=2P0−P1Pn′−Pn=Pn−Pn−1⇒Pn′=2Pn−Pn−1(6)\begin{aligned} {P_1} - {P_0} &= {P_0} - P_0' \Rightarrow P_0' = 2{P_0} - {P_1} \\ P_n' - {P_n} &= {P_n} - {P_{n - 1}} \Rightarrow P_n' = 2{P_n} - {P_{n - 1}} \\ \end{aligned}\tag{6}P1−P0Pn′−Pn=P0−P0′⇒P0′=2P0−P1=Pn−Pn−1⇒Pn′=2Pn−Pn−1(6)
假设现在有待拟合的n+1个离散点Pi=(xi,yi),(i=0,1,⋯,n){P_i} = \left( {{x_i},{y_i}} \right),\left( {i = 0,1, \cdots ,n} \right)Pi=(xi,yi),(i=0,1,⋯,n) ,采用3阶BSpline分段拼接拟合过程如下:
以P0,P1,P2,P3{P_0},{P_1},{P_2},{P_3}P0,P1,P2,P3为控制点绘制第1条3阶BSpline
以P1,P2,P3,P4{P_1},{P_2},{P_3},{P_4}P1,P2,P3,P4为控制点绘制第2条3阶BSpline
…
以Pn−3,Pn−2,Pn−1,Pn{P_{n-3}},{P_{n-2}},{P_{n-1}},{P_{n}}Pn−3,Pn−2,Pn−1,Pn为控制点绘制第n-2条3阶BSpline
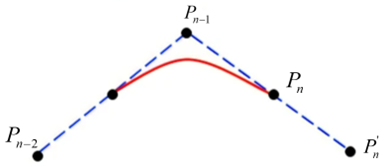
由于BSpline不经过任何控制点,我们想让它经过第一个控制P0P_0P0和最后一个PnP_ nPn控制点 ,则需要修改P0P_0P0和PnP_ nPn 。 修改前先描述一下3阶BSpline曲线与控制点之间的关系。

M1M_1M1 为P0P_0P0和P2P_2P2的中点, M2M_2M2 为P1P_1P1和P3P_3P3的中点, P1S=13P1M1{P_1}S = \frac{1}{3}{P_1}{M_1}P1S=31P1M1, P2E=13P2M2{P_2}E = \frac{1}{3}{P_2}{M_2}P2E=31P2M2, SE~\tilde{SE}SE~就是我们通过这4个控制点画出的3阶BSpline曲线。
现在修改为:
 | 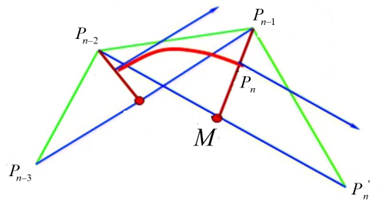 |
|---|
{M=12(P0′+P2)3(P0−P1)=M−P1⇒P0′=6P0−4P1−P2(7)\left\{ \begin{aligned} M &= \frac{1}{2}\left( {P_0' + {P_2}} \right)\\ 3\left( {{P_0} - {P_1}} \right) &= M - {P_1} \end{aligned} \right. \Rightarrow P_0' = 6{P_0} - 4{P_1} - {P_2}\tag{7}⎩⎨⎧M3(P0−P1)=21(P0′+P2)=M−P1⇒P0′=6P0−4P1−P2(7)
同理,
Pn′=6Pn−4Pn−1−Pn−2(8)P_n' = 6{P_n} - 4{P_{n - 1}} - {P_{n - 2}}\tag{8}Pn′=6Pn−4Pn−1−Pn−2(8)
2.3 基于BSpline曲线的路径拟合实验
2阶BSpline

2阶Bspline拟合11个数据点(不修改P0和Pn点,双击图片可放大看细节)

2阶Bspline拟合11个数据点(修改P0和Pn点,双击图片可放大看细节)

3阶BSpline

3阶Bspline拟合11个数据点(不修改P0和Pn点,双击图片可放大看细节)

3阶Bspline拟合11个数据点(修改P0和Pn点,双击图片可放大看细节)

实验结果分析:
1、验证了BSpline用分段拼接拟合的可行性,很明显,拟合曲线是全局可导的;
2、拟合精度明显比n阶的Bezier曲线要高。对于n+1n+1n+1个离散数据点,现在我们已经用n−1n-1n−1条的2阶BSpline曲线或者n−2n-2n−2条的3阶BSpline曲线拼接拟合,完成。
现在的问题是如何将2阶和3阶的BSpline曲线用Bezier曲线的描述。
2.4 BSpline To Bezier
以2阶为例
2阶Bezier公式如下
B2nd=(1−t)2P0+2(1−t)tP1+t2P2{B_{2nd}} = {\left( {1 - t} \right)^2}{P_0} + 2\left( {1 - t} \right)t{P_1} + {t^2}{P_2}B2nd=(1−t)2P0+2(1−t)tP1+t2P2
2阶BSpline公式如下
{a0=12(x0+x1)a1=x1−x0a2=12(x0−2x1+x2),{b0=12(y0+y1)b1=y1−y0b2=12(y0−2y1+y2)\left\{ \begin{aligned} {a_0} &= \frac{1}{2}\left( {{x_0} + {x_1}} \right) \\ {a_1} &= {x_1} - {x_0} \\ {a_2} &= \frac{1}{2}\left( {{x_0} - 2{x_1} + {x_2}} \right) \\ \end{aligned} \right.,\left\{ \begin{aligned} {b_0} &= \frac{1}{2}\left( {{y_0} + {y_1}} \right) \\ {b_1} &= {y_1} - {y_0} \\ {b_2} &= \frac{1}{2}\left( {{y_0} - 2{y_1} + {y_2}} \right) \\ \end{aligned} \right.⎩⎨⎧a0a1a2=21(x0+x1)=x1−x0=21(x0−2x1+x2),⎩⎨⎧b0b1b2=21(y0+y1)=y1−y0=21(y0−2y1+y2)
B(t)=(x(t),y(t))⇒{x(t)=a0+a1t+a2t2y(t)=b0+b1t+b2t2B\left( t \right) = \left( {x\left( t \right),y\left( t \right)} \right) \Rightarrow \left\{ \begin{aligned} x\left( t \right) &= {a_0} + {a_1}t + {a_2}{t^2} \\ y\left( t \right) &= {b_0} + {b_1}t + {b_2}{t^2} \\ \end{aligned} \right.B(t)=(x(t),y(t))⇒{x(t)y(t)=a0+a1t+a2t2=b0+b1t+b2t2
观察规律, 无论Bezier还是BSpline都是关于ttt的2阶线性函数,因此从原理上他们是可以完全等价的。观察Bezier的公式,ttt的系数完全由控制点P0,P1,P2{P_0},{P_1},{P_2}P0,P1,P2确定,也就是说3个控制可以唯一确定一条2阶的Bezier曲线,那么我们只要求出P0,P1,P2{P_0},{P_1},{P_2}P0,P1,P2就完成了BSpline到Bezier的转换。
令B(t)=B2ndB\left( t \right) = {B_{2nd}}B(t)=B2nd,让ttt的各阶系数分别相等,即可推导出P0,P1,P2{P_0},{P_1},{P_2}P0,P1,P2用a0,a1,a2,b0,b1,b2{a_0},{a_1},{a_2},{b_0},{b_1},{b_2}a0,a1,a2,b0,b1,b2表示的代数表达式:
{x0=a0x1=a0+12a1x2=a0+a1+a2,{y0=b0y1=b0+12b1y2=b0+b1+b2(9)\left\{ \begin{array}{l} {x_0} = {a_0}\\\\ {x_1} = {a_0} + \frac{1}{2}{a_1}\\\\ {x_2} = {a_0} + {a_1} + {a_2} \end{array} \right.,\left\{ \begin{array}{l} {y_0} = {b_0}\\\\ {y_1} = {b_0} + \frac{1}{2}{b_1}\\\\ {y_2} = {b_0} + {b_1} + {b_2} \end{array} \right.\tag{9}⎩⎨⎧x0=a0x1=a0+21a1x2=a0+a1+a2,⎩⎨⎧y0=b0y1=b0+21b1y2=b0+b1+b2(9)
P0=(x0,y0),P1=(x1,y1),P2=(x2,y2)(10){P_0} = \left( {{x_0},{y_0}} \right),{P_1} = \left( {{x_1},{y_1}} \right),{P_2} = \left( {{x_2},{y_2}} \right)\tag{10}P0=(x0,y0),P1=(x1,y1),P2=(x2,y2)(10)
注意:这里的P0=(x0,y0){P_0} = \left( {{x_0},{y_0}} \right)P0=(x0,y0),并不是原始的需要拟合的数据点。而是用Bezier来等价描述BSpline的数据点。
同理,3阶的转换公式如下:
{x0=a0x1=a0+13a1x2=a0+23a1+13a2x3=a0+a1+a2+a3,{y0=b0y1=b0+13b1y2=b0+23b1+13b2y3=b0+b1+b2+b3(11)\left\{ \begin{array}{l} {x_0} = {a_0}\\\\ {x_1} = {a_0} + \frac{1}{3}{a_1}\\\\ {x_2} = {a_0} + \frac{2}{3}{a_1} + \frac{1}{3}{a_2}\\\\ {x_3} = {a_0} + {a_1} + {a_2} + {a_3} \end{array} \right.,\left\{ \begin{array}{l} {y_0} = {b_0}\\\\ {y_1} = {b_0} + \frac{1}{3}{b_1}\\\\ {y_2} = {b_0} + \frac{2}{3}{b_1} + \frac{1}{3}{b_2}\\\\ {y_3} = {b_0} + {b_1} + {b_2} + {b_3} \end{array} \right.\tag{11}⎩⎨⎧x0=a0x1=a0+31a1x2=a0+32a1+31a2x3=a0+a1+a2+a3,⎩⎨⎧y0=b0y1=b0+31b1y2=b0+32b1+31b2y3=b0+b1+b2+b3(11)
P0=(x0,y0),P1=(x1,y1),P2=(x2,y2),P3=(x3,y3)(12){P_0} = \left( {{x_0},{y_0}} \right),{P_1} = \left( {{x_1},{y_1}} \right),{P_2} = \left( {{x_2},{y_2}} \right),{P_3} = \left( {{x_3},{y_3}} \right)\tag{12}P0=(x0,y0),P1=(x1,y1),P2=(x2,y2),P3=(x3,y3)(12)
基于BSpline的路径拟合到此结束,BSpline由于其包络性和平滑性,广泛应用于无人驾驶路径规划领域。但由于BSpline不经过任何数据点,在某些特殊情况下,并不适用,因此接下来我们介绍一种经过所有点的曲线拟合方式 Catmull_Rom。
3 Catmull_Rom路径拟合-分段拼接
通过调研发现,用Catmull_Rom曲线来拟合路径,也是可以采用分段拼接的方式的,而且它同样可以保证拼接处是连续的,即全局可导,而且它还有一个致命优势,那就是它可以经过所有用于拟合的数据点。
3.1 Catmull_Rom曲线绘制原理
Catmull_Rom曲线有两个特点:
1、Catmull_Rom是3阶线性拟合,至少需要4个数据点;
2、假设我现在用A B C D 4个数据点绘制Catmull_Rom曲线,曲线只会经过B C。
关注Pi{P_i}Pi的4个数据点:
P0=(x0,y0),P1=(x1,y1),P2=(x2,y2),P3=(x3,y3){P_0} = \left( {{x_0},{y_0}} \right),{P_1} = \left( {{x_1},{y_1}} \right),{P_2} = \left( {{x_2},{y_2}} \right),{P_3} = \left( {{x_3},{y_3}} \right)P0=(x0,y0),P1=(x1,y1),P2=(x2,y2),P3=(x3,y3)
定义向量t≜0:δt:1t \triangleq 0:\delta t:1t≜0:δt:1(这是MatLAB的写法, δt\delta tδt决定曲线绘制精度)。
Catmull_Rom拟合公式:
{a0=x1a1=12(−x0+x2)a2=12(2x0−5x1+4x2−x3)a3=12(−x0+3x1−3x2+x3),{b0=y1b1=12(−y0+y2)b2=12(2y0−5y1+4y2−y3)b3=12(−y0+3y1−3y2+y3)(13)\left\{ \begin{array}{l} {a_0} = {x_1}\\\\ {a_1} = \frac{1}{2}\left( { - {x_0} + {x_2}} \right)\\\\ {a_2} = \frac{1}{2}\left( {2{x_0} - 5{x_1} + 4{x_2} - {x_3}} \right)\\\\ {a_3} = \frac{1}{2}\left( { - {x_0} + 3{x_1} - 3{x_2} + {x_3}} \right) \end{array} \right.,\left\{ \begin{array}{l} {b_0} = {y_1}\\\\ {b_1} = \frac{1}{2}\left( { - {y_0} + {y_2}} \right)\\\\ {b_2} = \frac{1}{2}\left( {2{y_0} - 5{y_1} + 4{y_2} - {y_3}} \right)\\\\ {b_3} = \frac{1}{2}\left( { - {y_0} + 3{y_1} - 3{y_2} + {y_3}} \right) \end{array} \right.\tag{13}⎩⎨⎧a0=x1a1=21(−x0+x2)a2=21(2x0−5x1+4x2−x3)a3=21(−x0+3x1−3x2+x3),⎩⎨⎧b0=y1b1=21(−y0+y2)b2=21(2y0−5y1+4y2−y3)b3=21(−y0+3y1−3y2+y3)(13)
Catmull_Rom(t)=(x(t),y(t))⇒{x(t)=a0+a1t+a2t2+a3t3y(t)=b0+b1t+b2t2+b3t3(14)Catmull\_Rom\left( t \right) = \left( {x\left( t \right),y\left( t \right)} \right) \Rightarrow \left\{ \begin{array}{l} x\left( t \right) = {a_0} + {a_1}t + {a_2}{t^2} + {a_3}{t^3}\\\\ y\left( t \right) = {b_0} + {b_1}t + {b_2}{t^2} + {b_3}{t^3} \end{array} \right.\tag{14}Catmull_Rom(t)=(x(t),y(t))⇒⎩⎨⎧x(t)=a0+a1t+a2t2+a3t3y(t)=b0+b1t+b2t2+b3t3(14)
3.2 Catmull_Rom分段拼接方法
前面我们也提到了,假设我现在用A B C D 4个数据点绘制Catmull_Rom曲线,曲线只会经过B C。如果我用B C D E个数据点绘制Catmull_Rom曲线,只会经过C D。如果想让拟合曲线经过所有控制点,则只需要分别在首和尾各添加一个控制点。
添加首尾两点的定义如下:
Ps≜(xs,ys),Pe≜(xe,ye)(15){P_s} \triangleq \left( {{x_s},{y_s}} \right),{P_e} \triangleq \left( {{x_e},{y_e}} \right)\tag{15}Ps≜(xs,ys),Pe≜(xe,ye)(15)
xs=x0+(x0−x1)ys=y0+(y0−y1)xe=xn+(xn−xn−1)ye=yn+(yn−yn−1)(16)\begin{aligned} {x_s} &= {x_0} + \left( {{x_0} - {x_1}} \right) \\ {y_s} &= {y_0} + \left( {{y_0} - {y_1}} \right) \\ {x_e} &= {x_n} + \left( {{x_n} - {x_{n - 1}}} \right)\\ {y_e} &= {y_n} + \left( {{y_n} - {y_{n - 1}}} \right) \end{aligned}\tag{16}xsysxeye=x0+(x0−x1)=y0+(y0−y1)=xn+(xn−xn−1)=yn+(yn−yn−1)(16)
以Ps,P0,P1,P2,P3,⋯,Pn,Pe{P_s},{P_0},{P_1},{P_2},{P_3}, \cdots ,{P_n},{P_e}Ps,P0,P1,P2,P3,⋯,Pn,Pe为待拟合的数据点。
以Ps,P0,P1,P2{P_s},{P_0},{P_1},{P_2}Ps,P0,P1,P2绘制第1条Catmull_Rom曲线
以P0,P1,P2,P3{P_0},{P_1},{P_2},{P_3}P0,P1,P2,P3绘制第2条Catmull_Rom曲线
…
以Pn−2,Pn−1,Pn,Pe{P_{n-2}},{P_{n-1}},{P_n},{P_e}Pn−2,Pn−1,Pn,Pe为控制点绘制第n条Catmull_Rom曲线
3.3 基于Catmull_Rom曲线的路径拟合实验
直接上图

显然,Catmull_Rom曲线的拟合效果是很好的,对于数据点噪声较小的情况,是很适合用这种穿过所有数据点的曲线拟合方式的。
3.4 Catmull_Rom To Bezier
本质是 Catmull_Rom也是关于ttt的3阶线性函数,因此从原理上每一条Catmull_Rom曲线段是可以完全等价为3阶的Bezier曲线的。
Catmull_Rom和BSpline都是用a0,a1,a2,a3,b0,b1,b2,b3{a_0},{a_1},{a_2},{a_3},{b_0},{b_1},{b_2},{b_3}a0,a1,a2,a3,b0,b1,b2,b3作为系数,因此Catmull_Rom的转换公式和3阶BSpline的转换公式一样。
{x0=a0x1=a0+13a1x2=a0+23a1+13a2x3=a0+a1+a2+a3,{y0=b0y1=b0+13b1y2=b0+23b1+13b2y3=b0+b1+b2+b3(17)\left\{ \begin{array}{l} {x_0} = {a_0}\\\\ {x_1} = {a_0} + \frac{1}{3}{a_1}\\\\ {x_2} = {a_0} + \frac{2}{3}{a_1} + \frac{1}{3}{a_2}\\\\ {x_3} = {a_0} + {a_1} + {a_2} + {a_3} \end{array} \right.,\left\{ \begin{array}{l} {y_0} = {b_0}\\\\ {y_1} = {b_0} + \frac{1}{3}{b_1}\\\\ {y_2} = {b_0} + \frac{2}{3}{b_1} + \frac{1}{3}{b_2}\\\\ {y_3} = {b_0} + {b_1} + {b_2} + {b_3} \end{array} \right.\tag{17}⎩⎨⎧x0=a0x1=a0+31a1x2=a0+32a1+31a2x3=a0+a1+a2+a3,⎩⎨⎧y0=b0y1=b0+31b1y2=b0+32b1+31b2y3=b0+b1+b2+b3(17)
P0=(x0,y0),P1=(x1,y1),P2=(x2,y2),P3=(x3,y3)(18){P_0} = \left( {{x_0},{y_0}} \right),{P_1} = \left( {{x_1},{y_1}} \right),{P_2} = \left( {{x_2},{y_2}} \right),{P_3} = \left( {{x_3},{y_3}} \right)\tag{18}P0=(x0,y0),P1=(x1,y1),P2=(x2,y2),P3=(x3,y3)(18)
参考文献:
https://shenchunxu.blog.csdn.net/article/details/54411098?spm=1001.2014.3001.5506
https://zhuanlan.zhihu.com/p/137539722
上一篇:解锁中医“艾”的养生哲学:从艾草到香囊,轻松唤醒脊柱活力
下一篇:Python安装demjson模块报错:error in demjson setup command: use_2to3 is invalid