
arduino uno学习笔记(4)
创始人
2025-05-29 09:31:37
目录
LM35温度传感器
DHT1温湿度传感器
MQ-2可燃气体传感器
雨滴传感器编辑
HC-SR04超声波传感器编辑
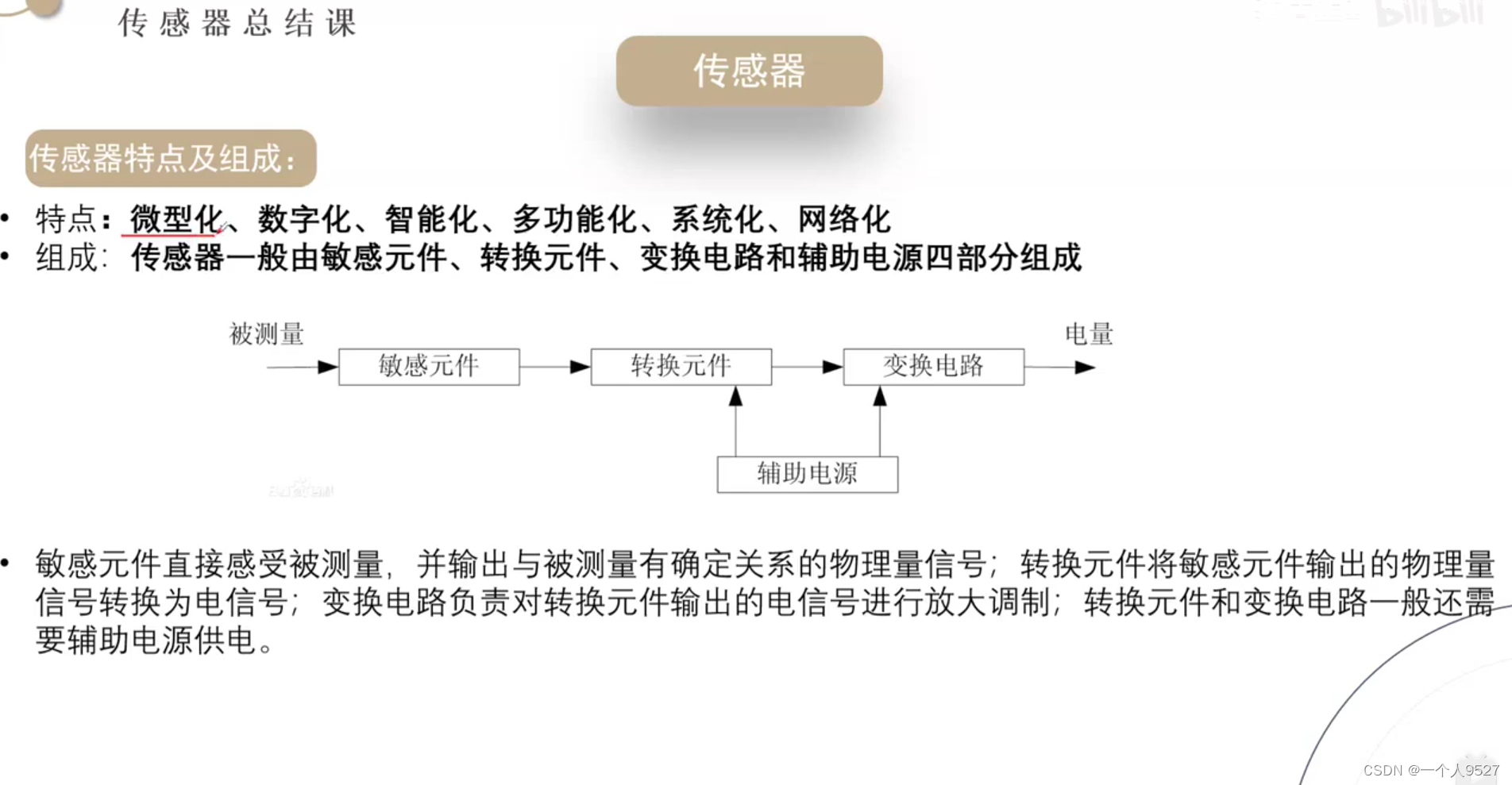
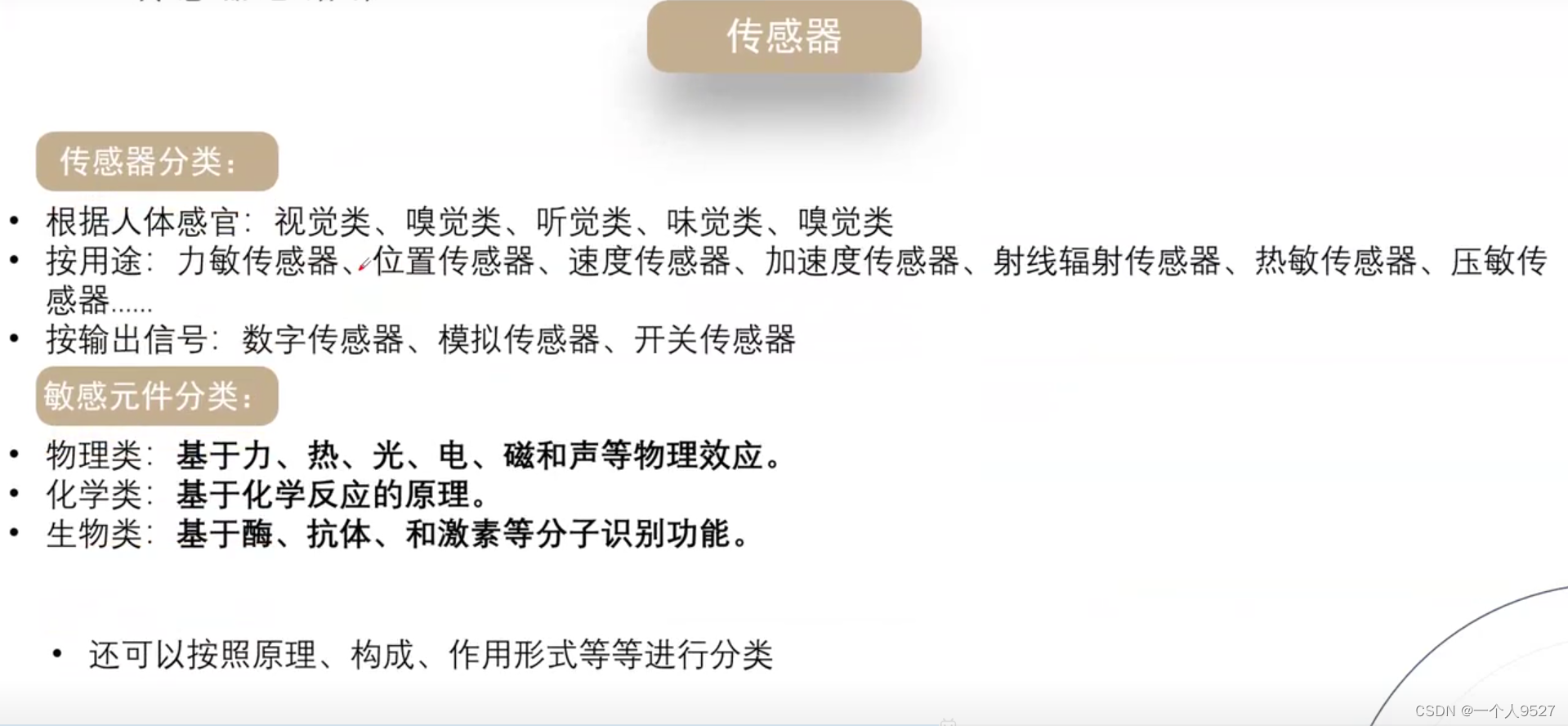
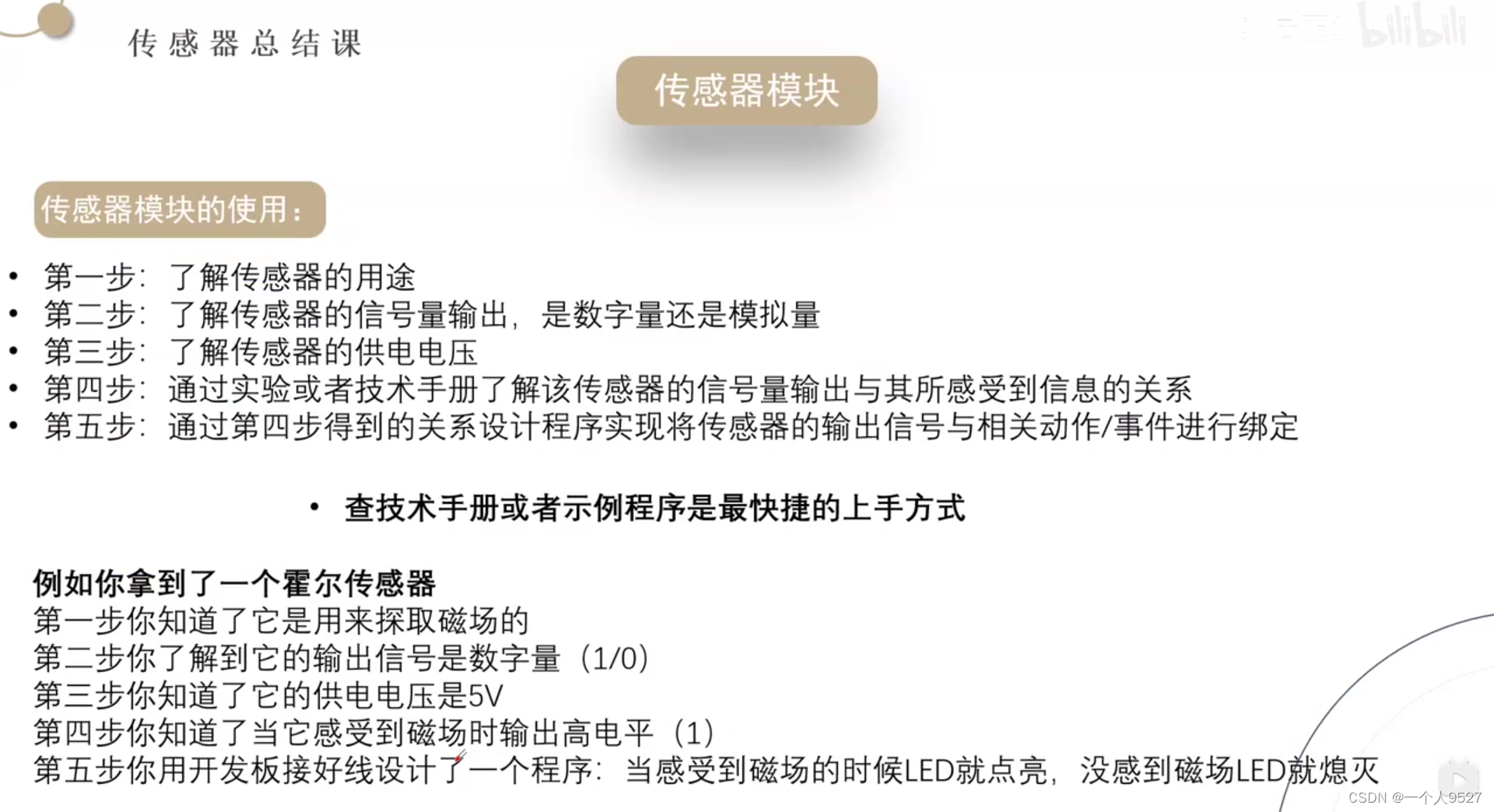
传感器总结课
蜂鸣器
130马达
L298n电机驱动模块
L9110 电机驱动模块
TB6612电机驱动模块
SG90舵机
继电器
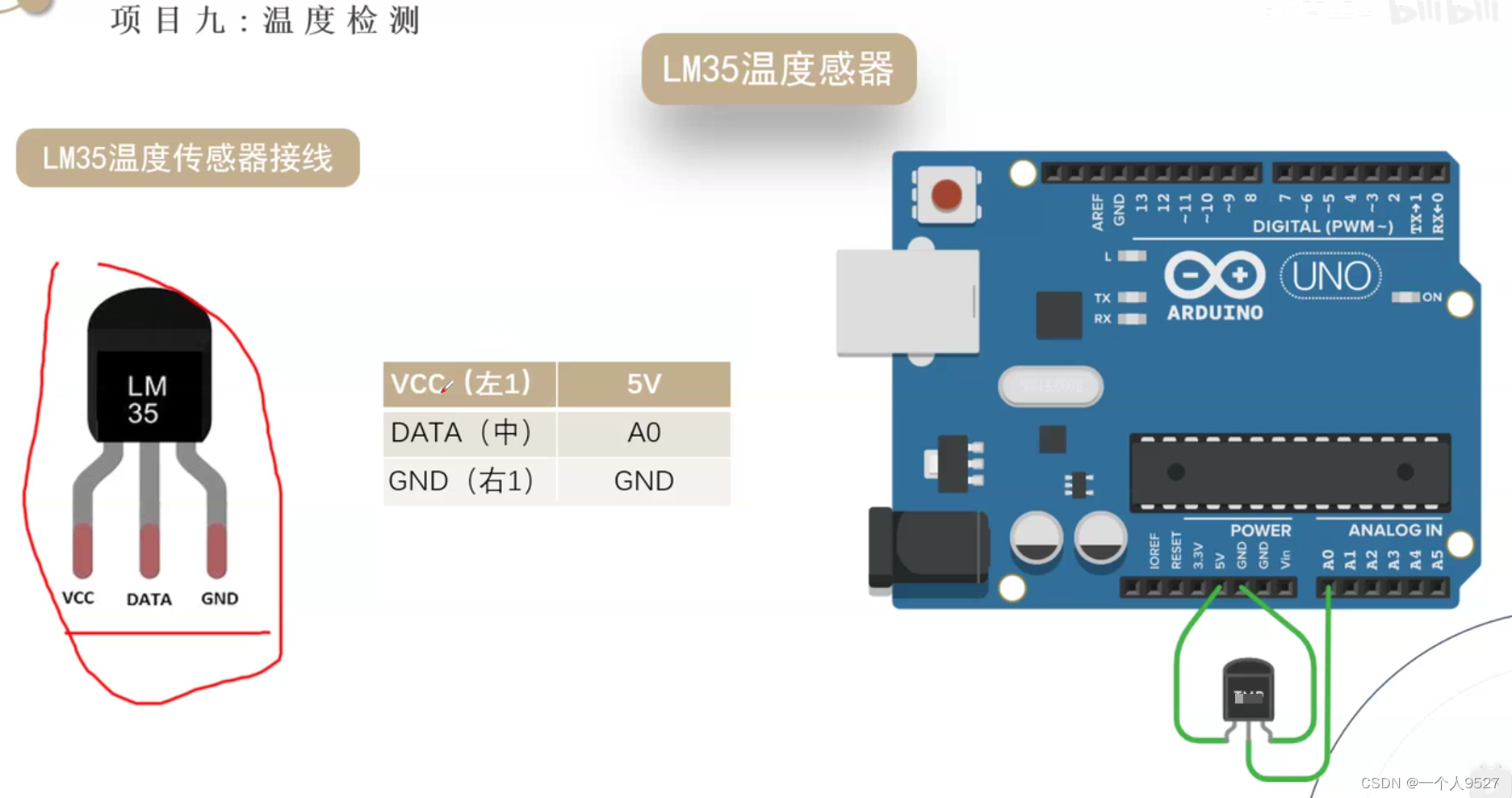
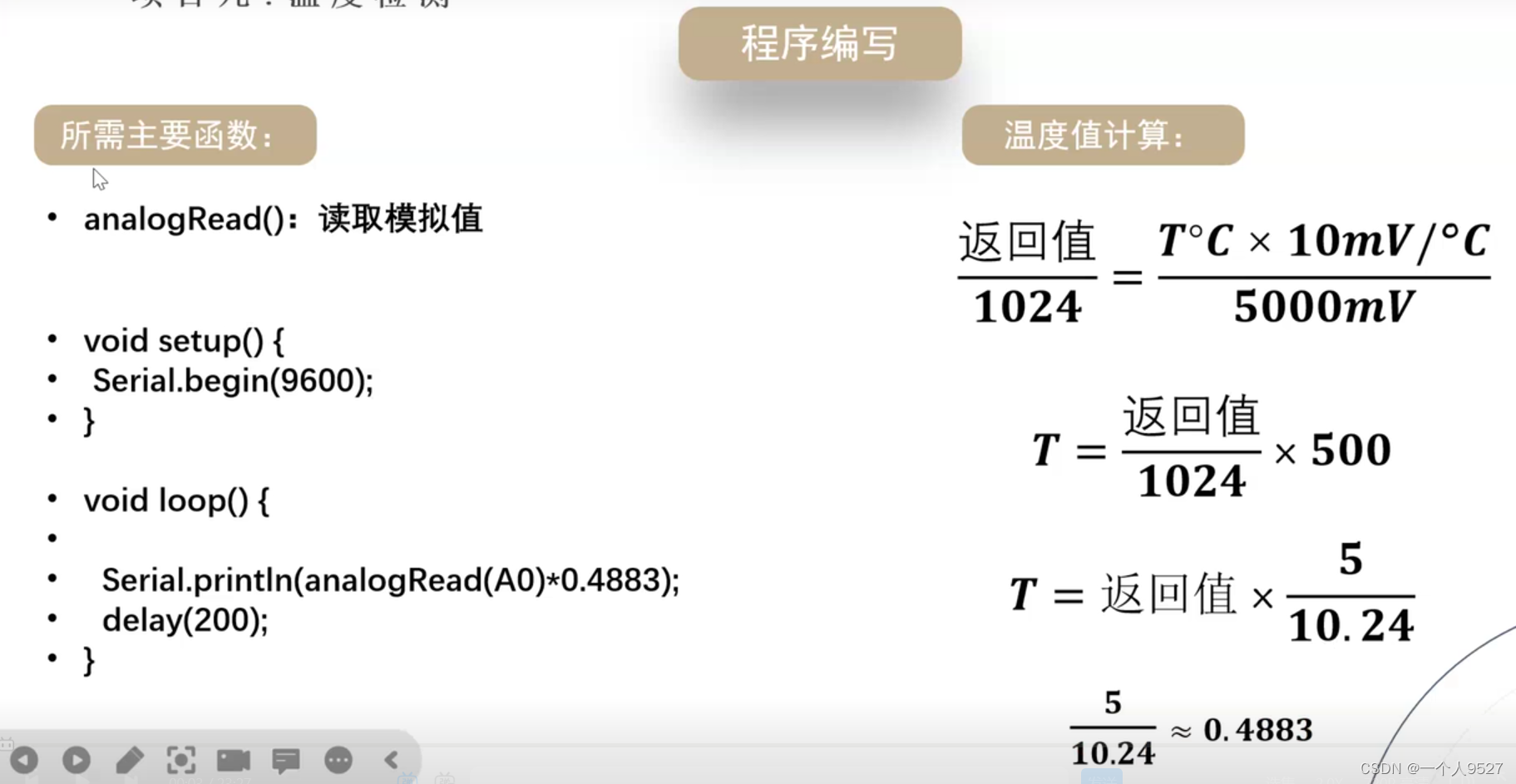
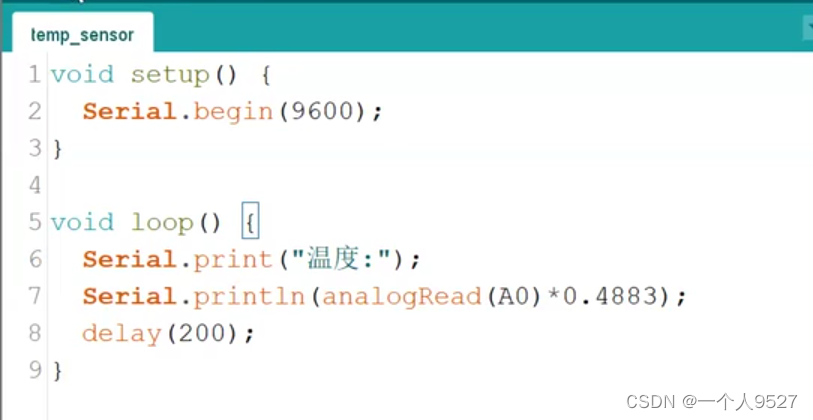
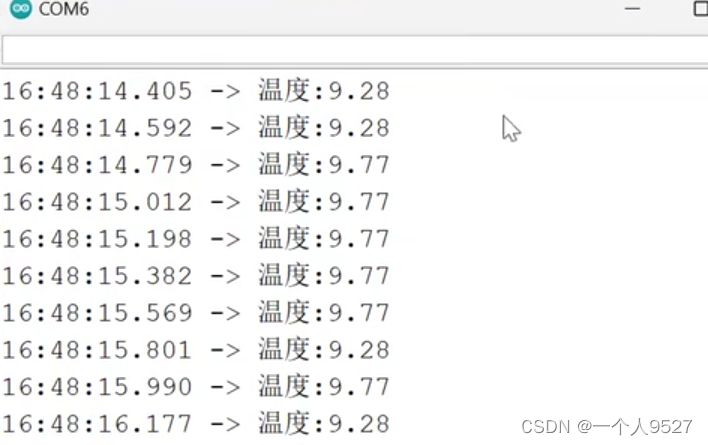
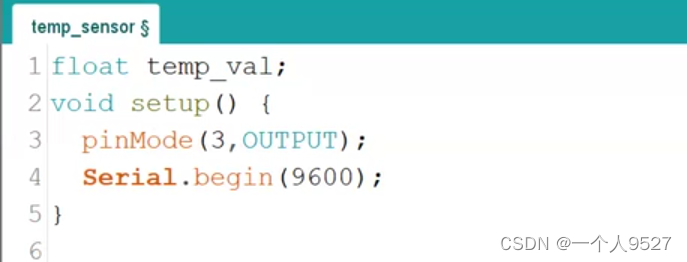
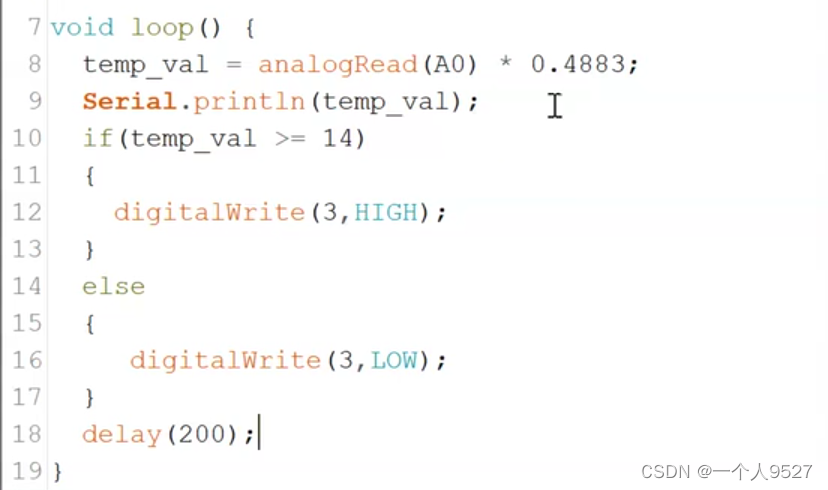
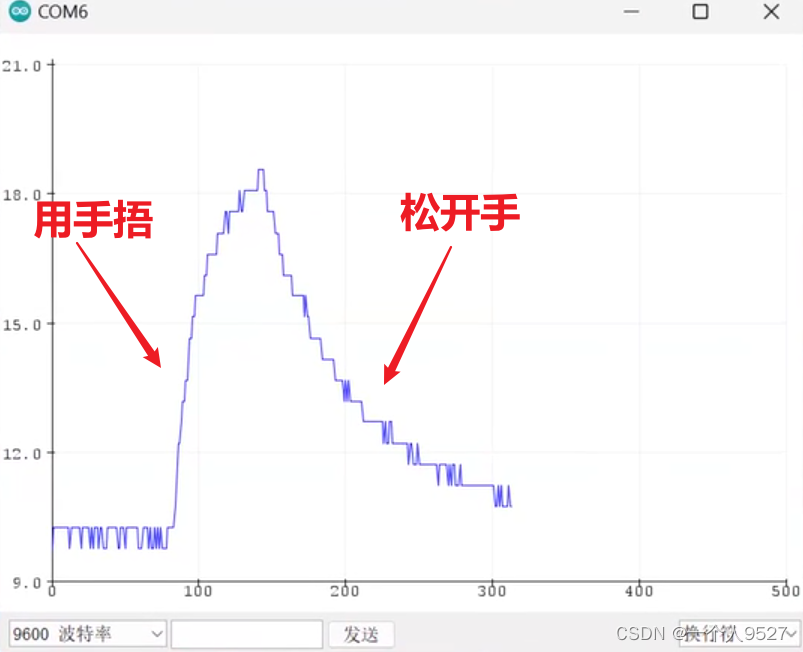
LM35温度传感器
温度和电压成正比例函数,y=Kx;
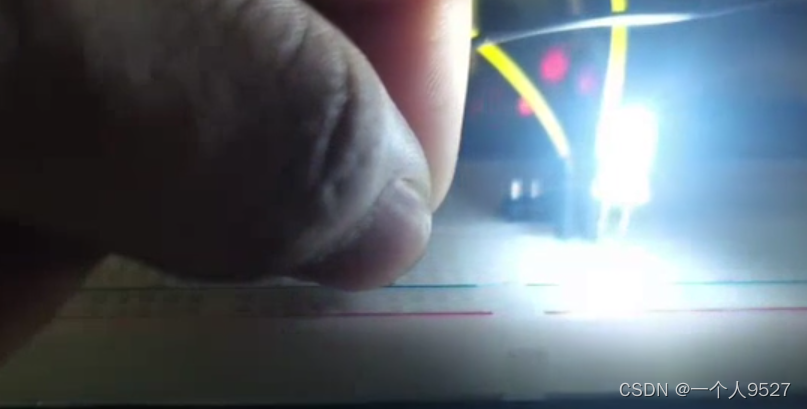
用手捂着温度传感器:led灯亮了
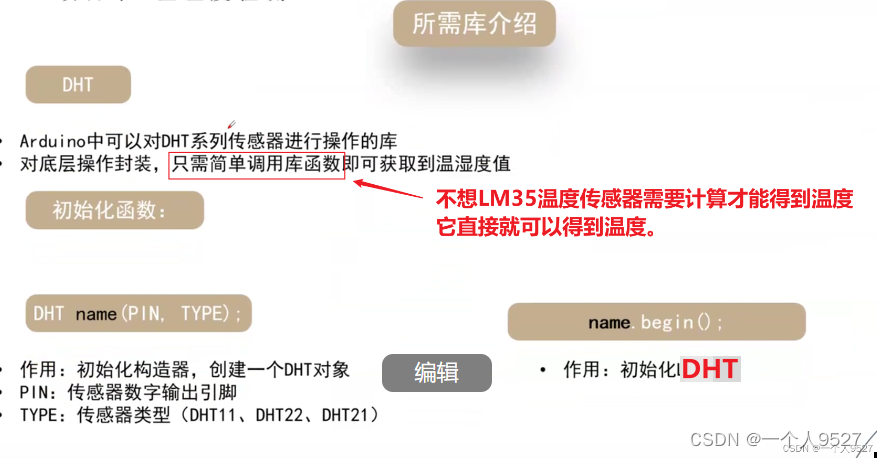
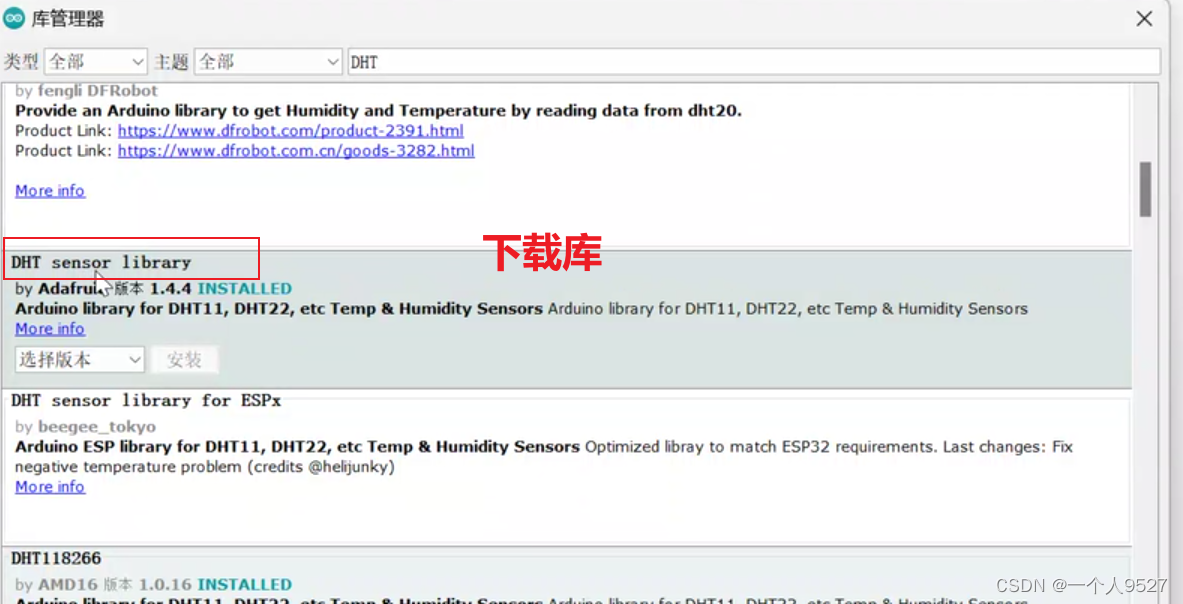
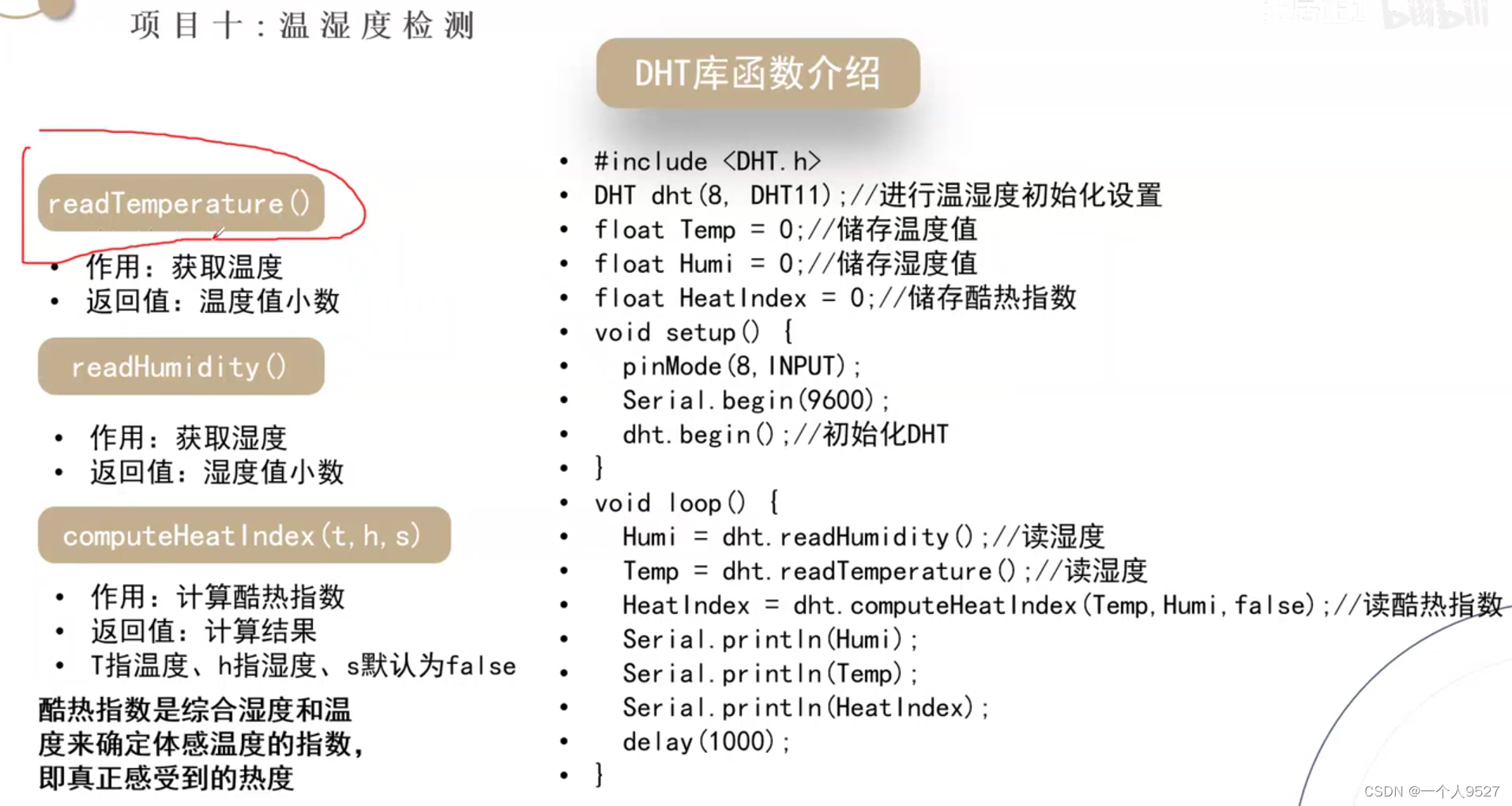
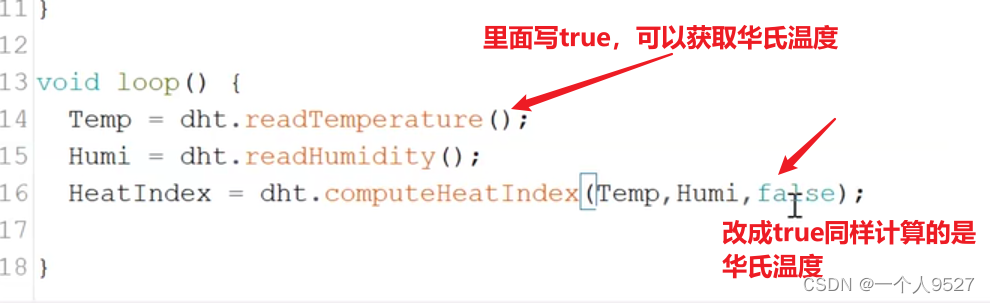
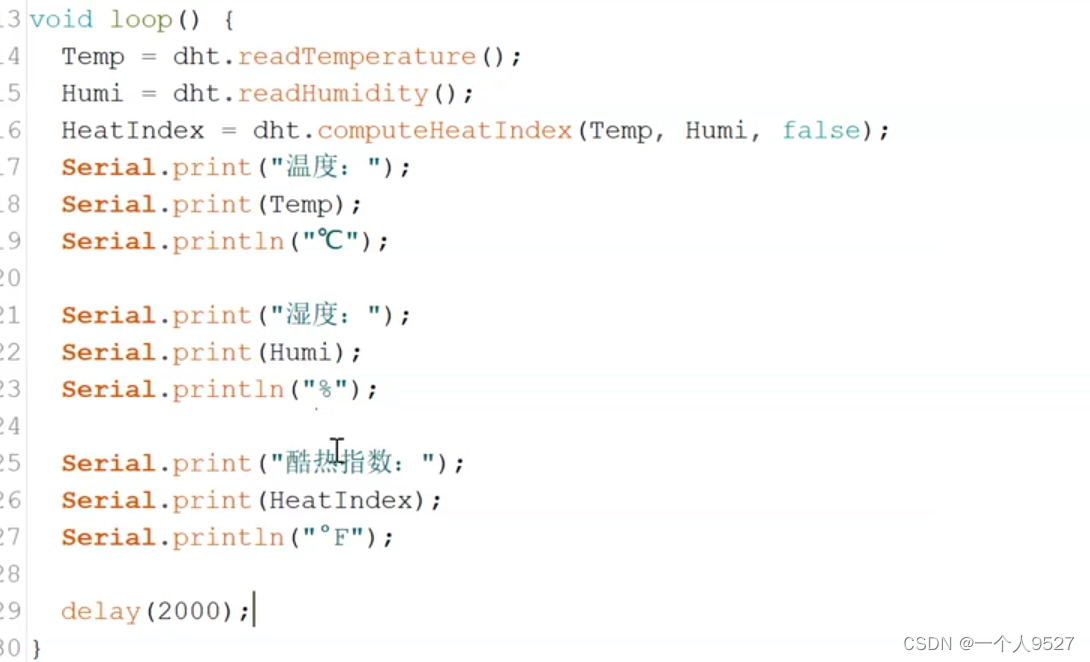
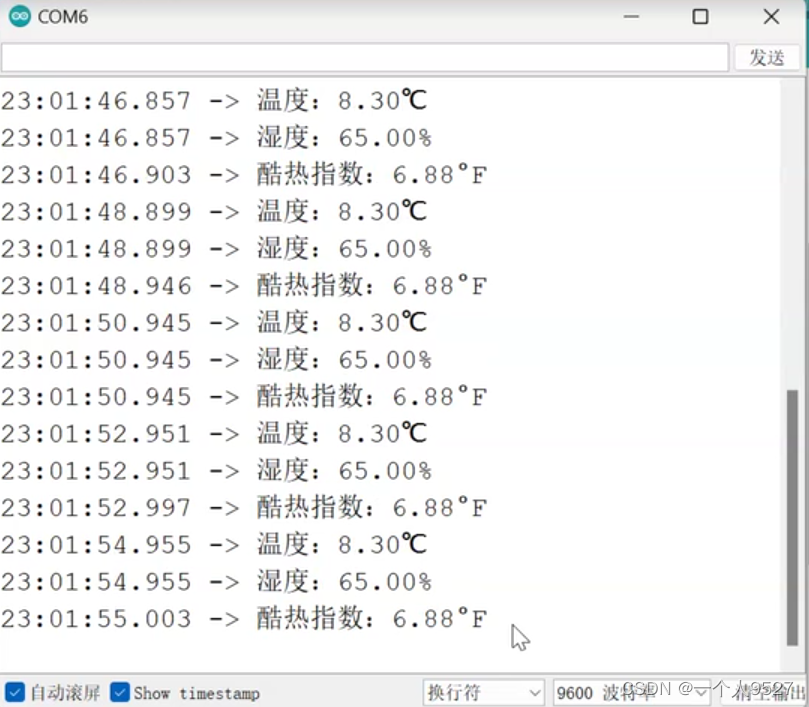
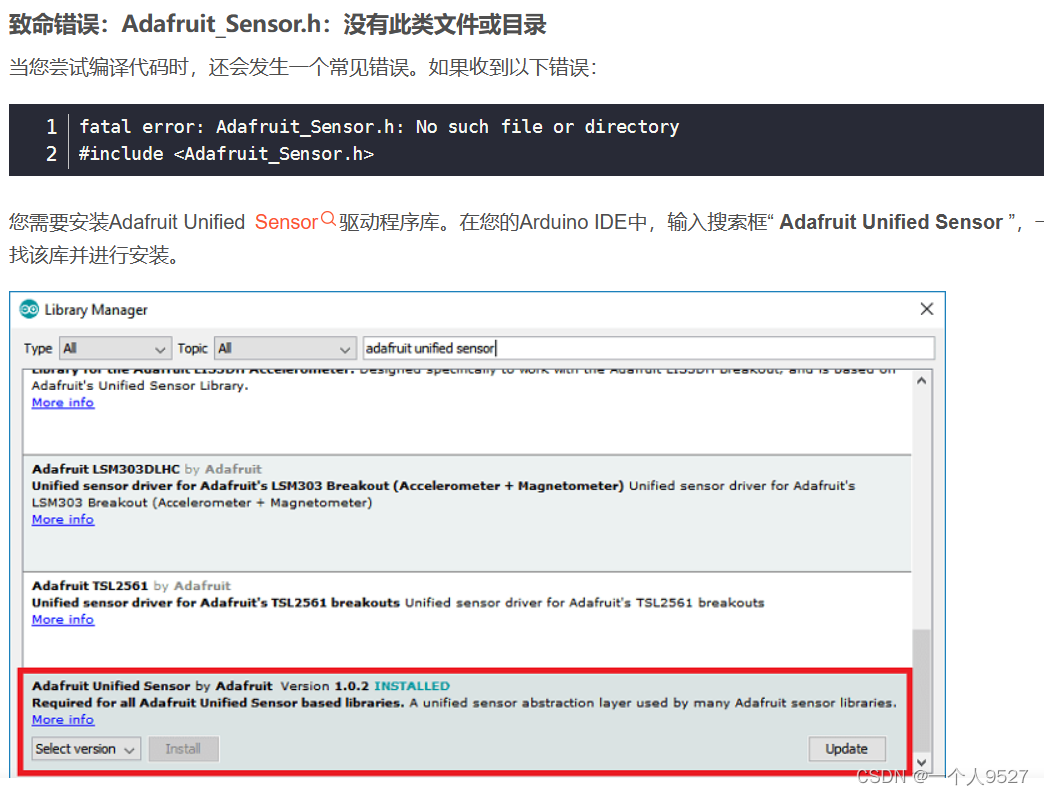
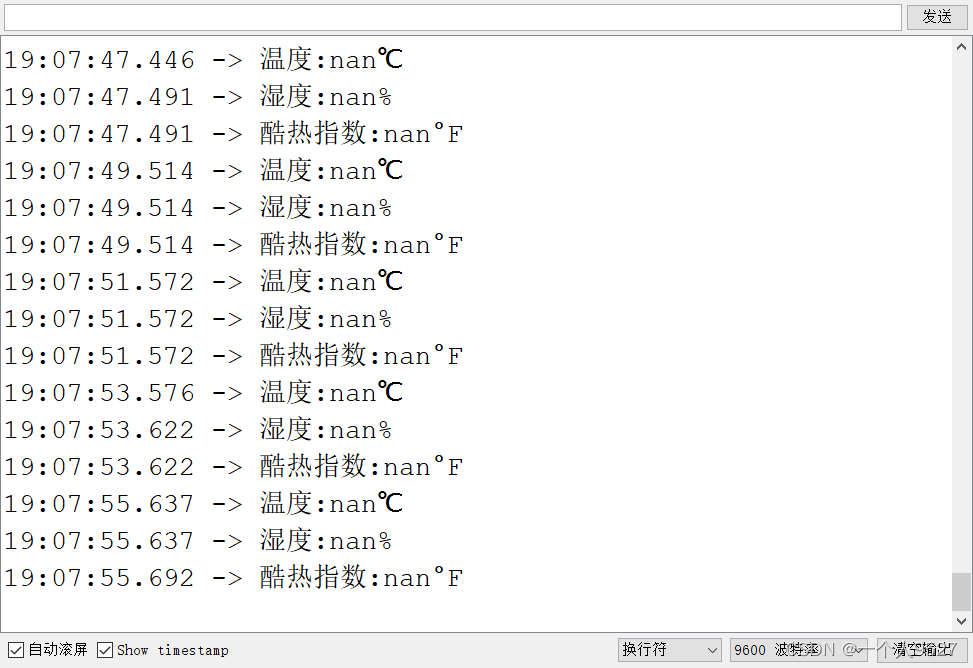
DHT1温湿度传感器
代码部分:
如果有错误看看(错误原因)
(21条消息) Arduino关于DHT11和DHT22湿度和温度传感器的完整指南_dht22 arduino_蔚蓝慕的博客-CSDN博客
很有可能线子坏掉了,我是换了线,全正常了
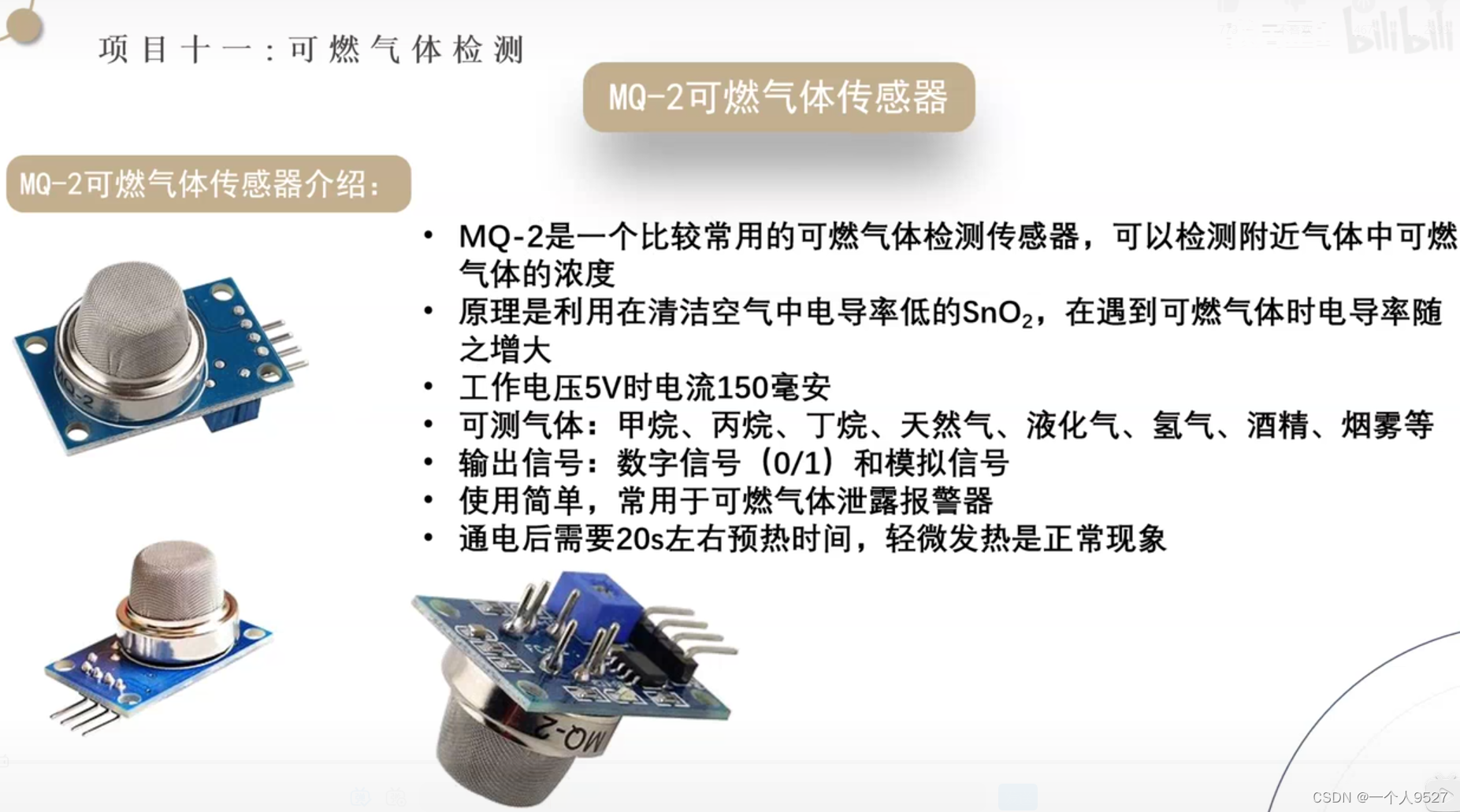
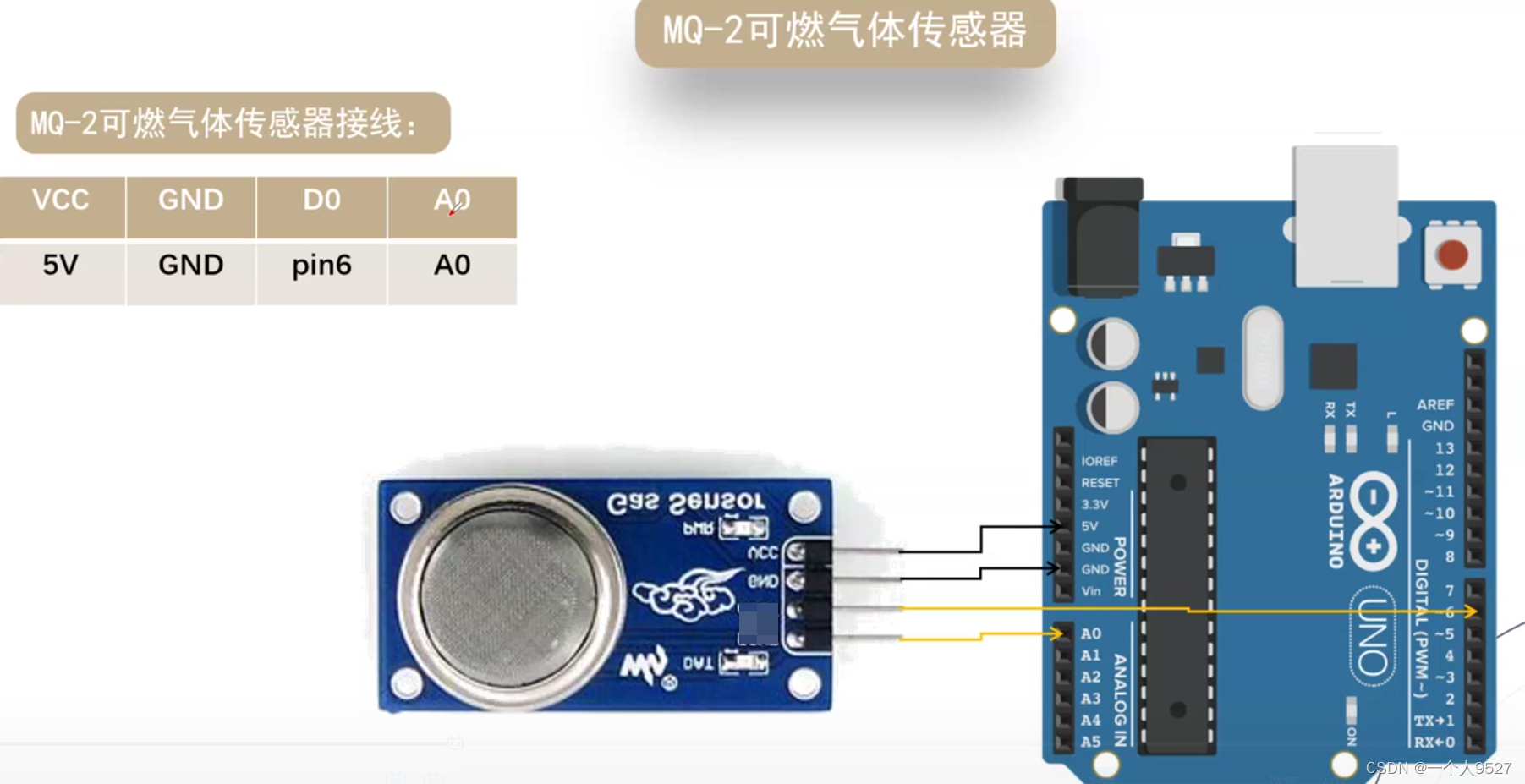
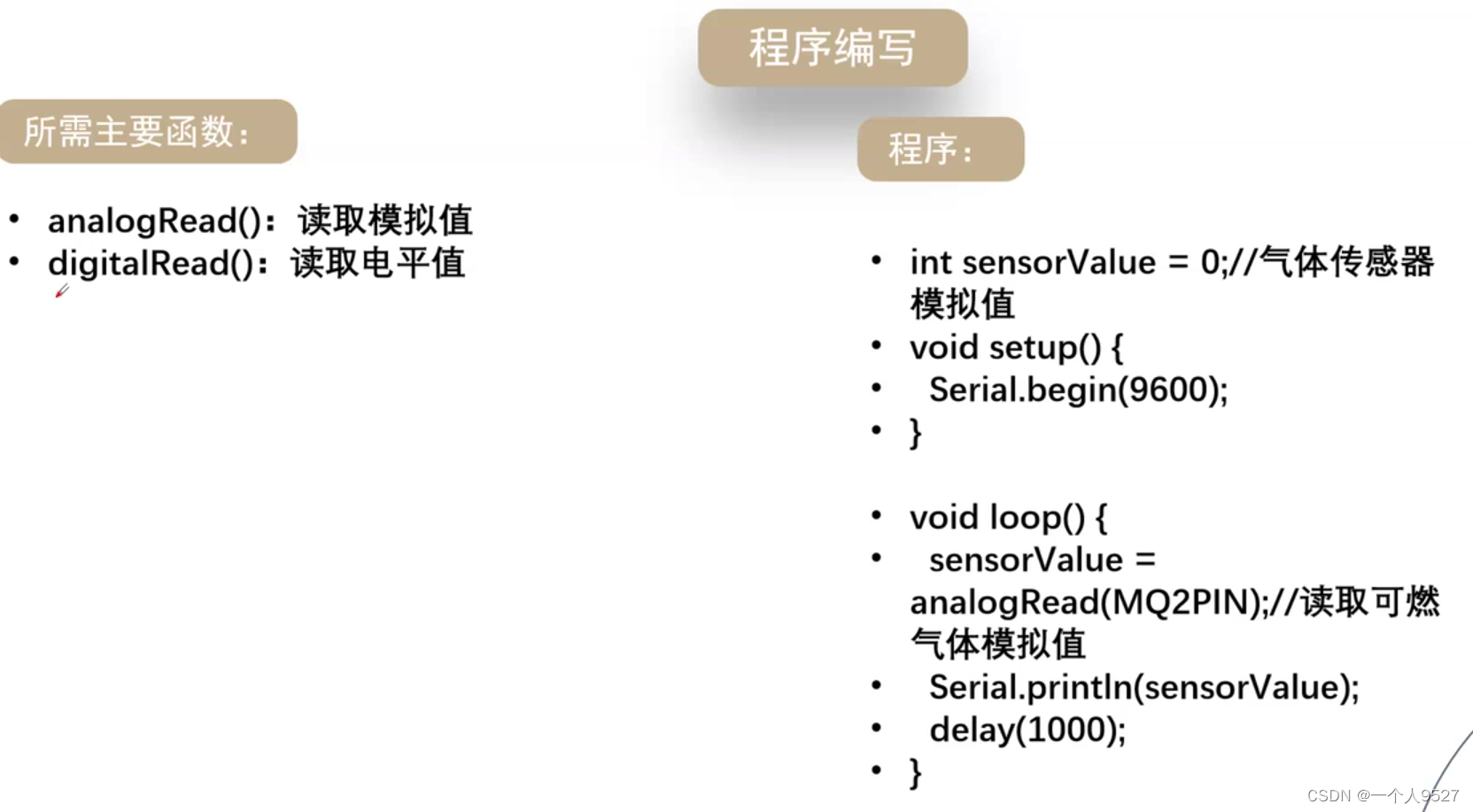
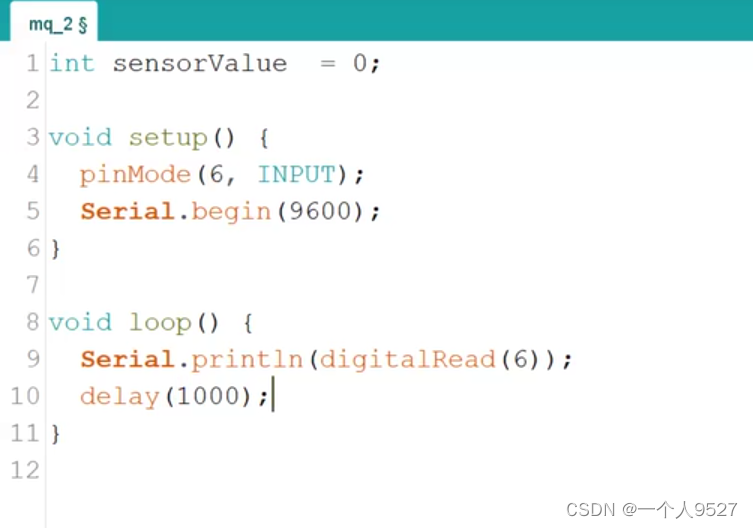
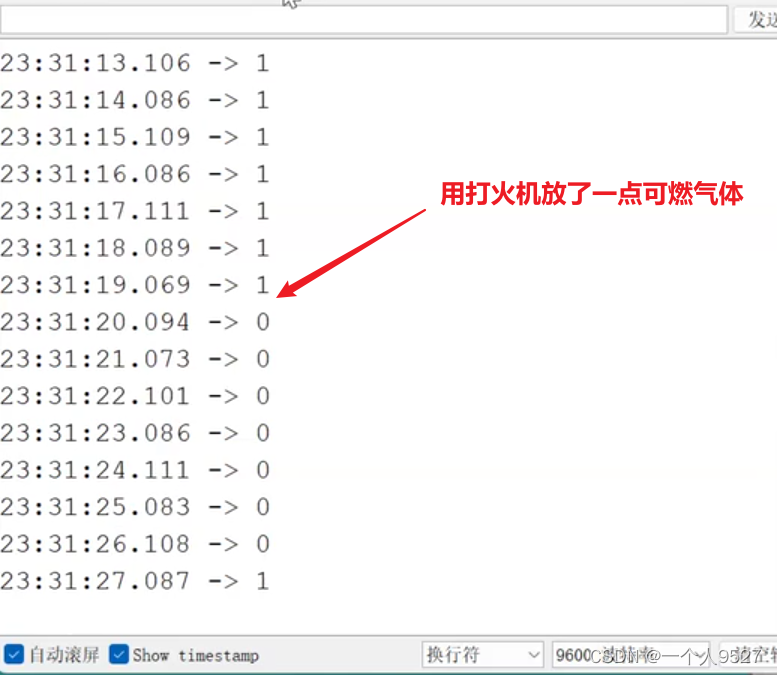
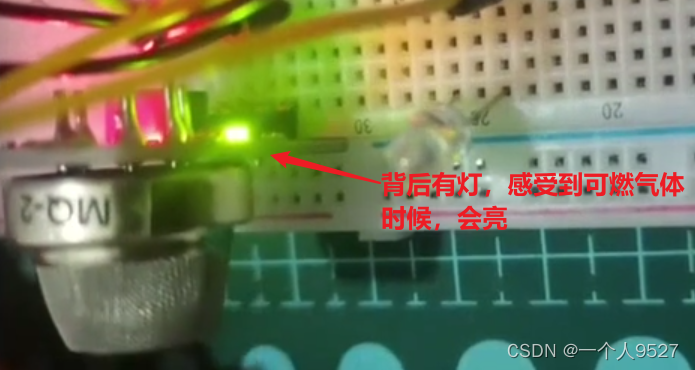
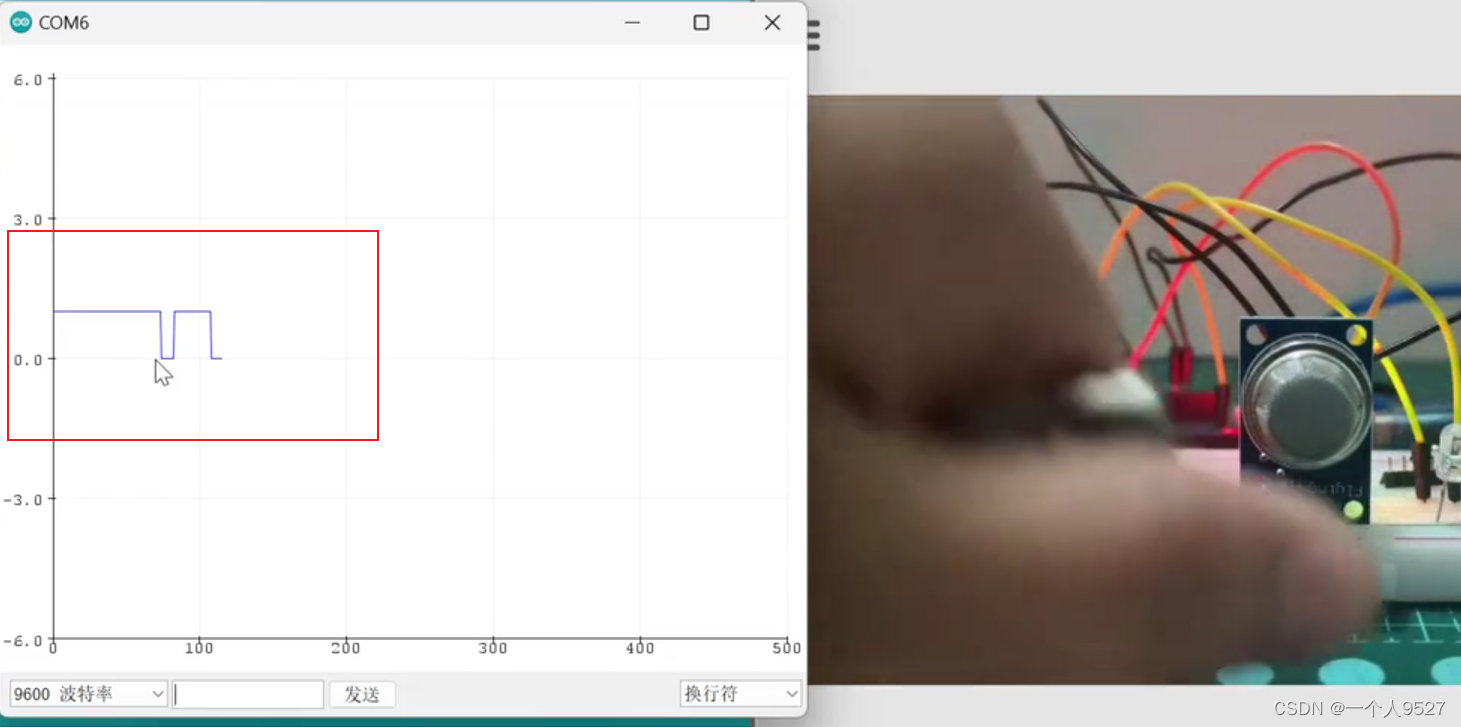
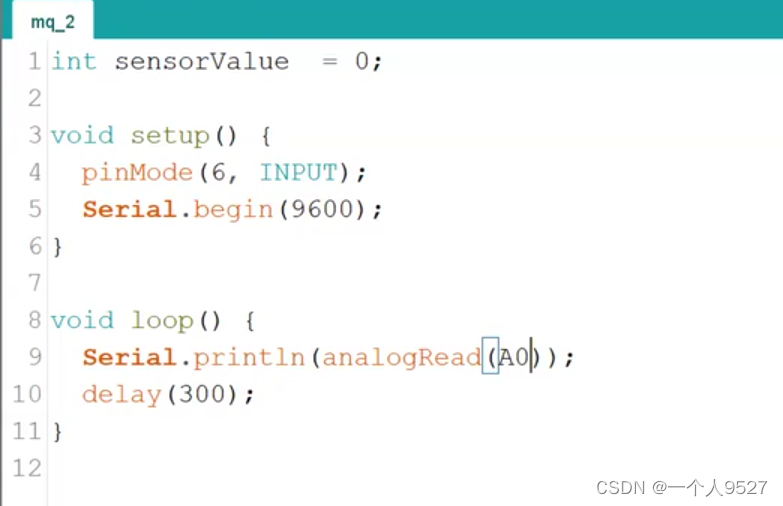
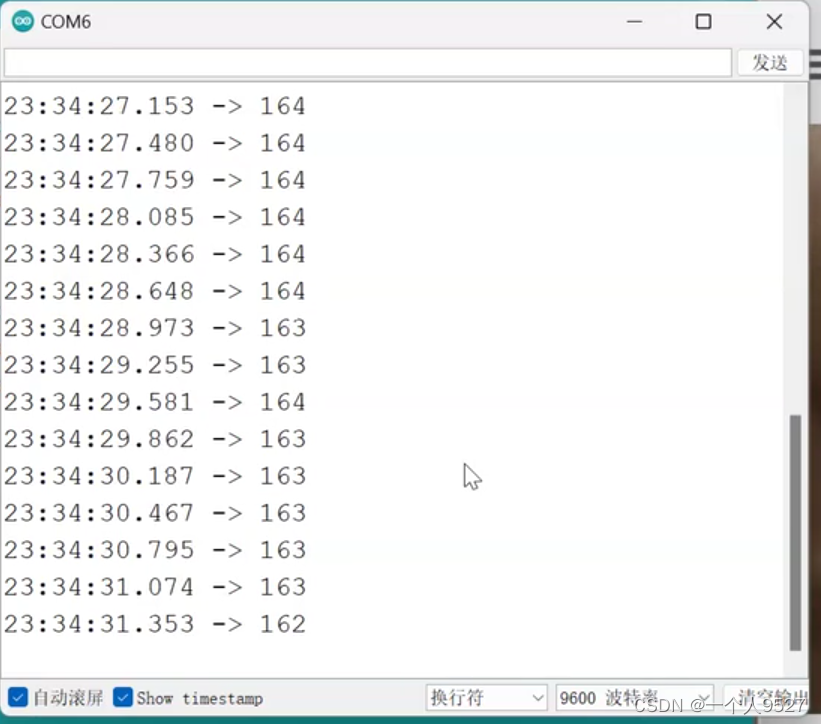
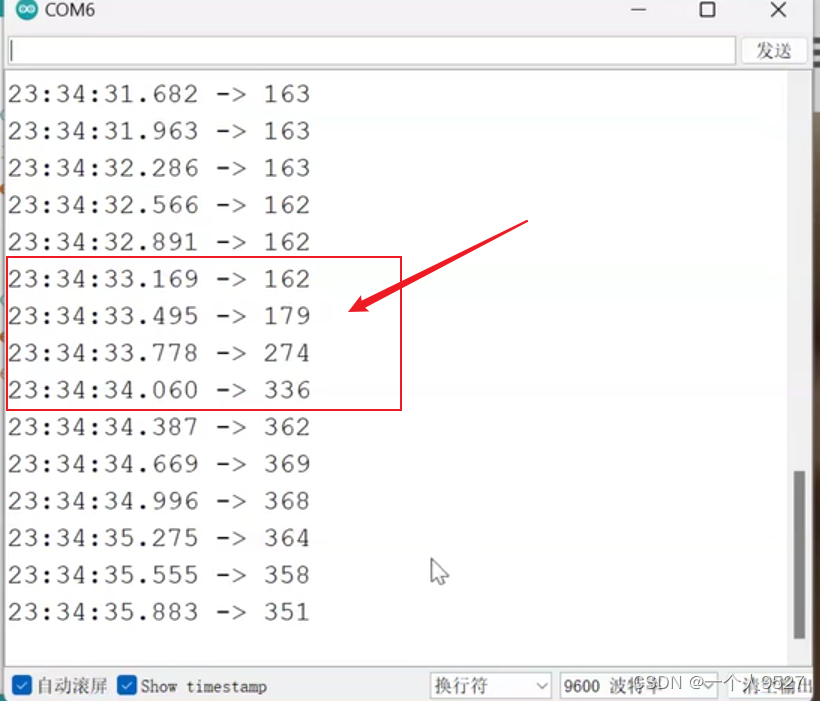
MQ-2可燃气体传感器
后面有螺丝可以调节阈值;
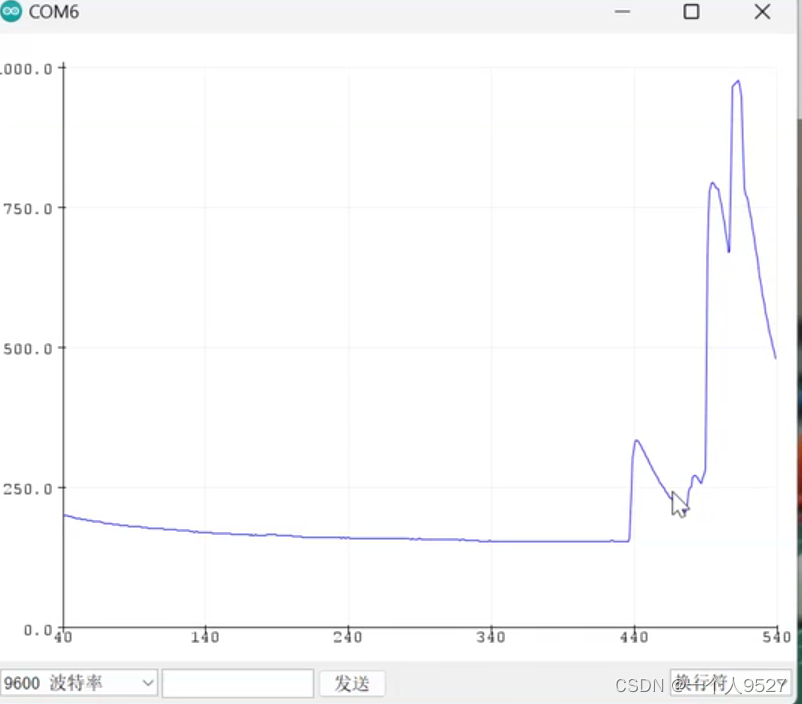
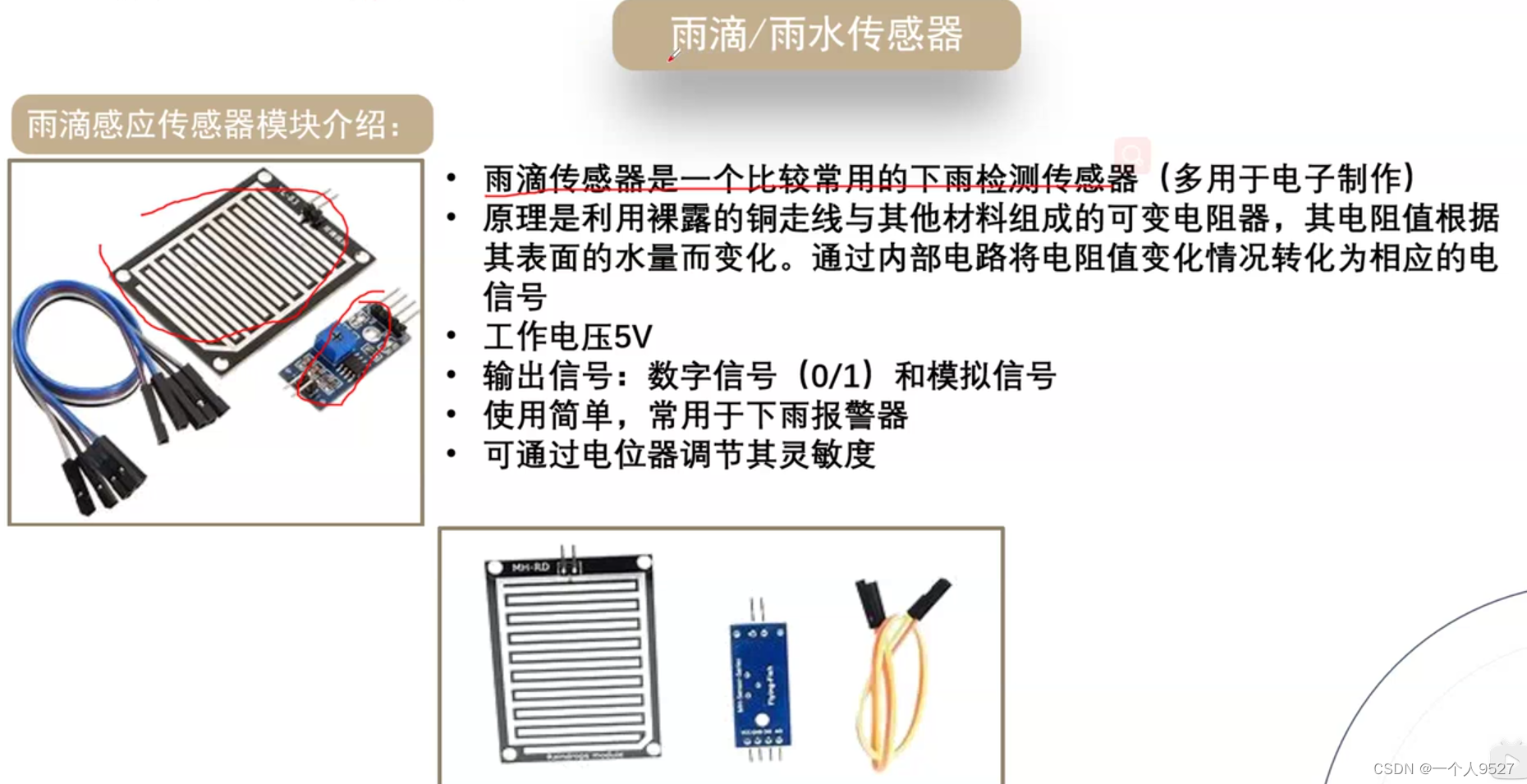
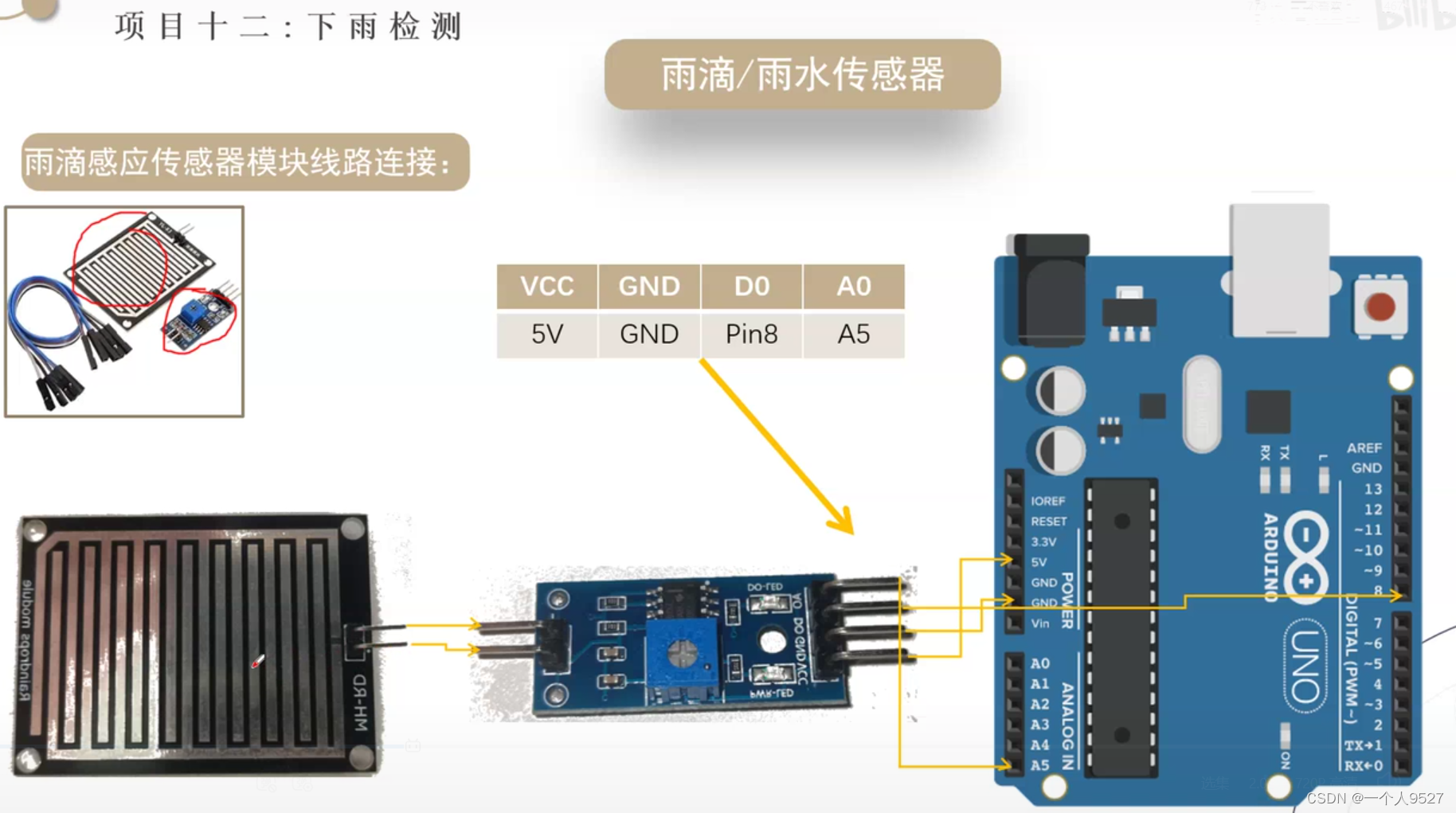
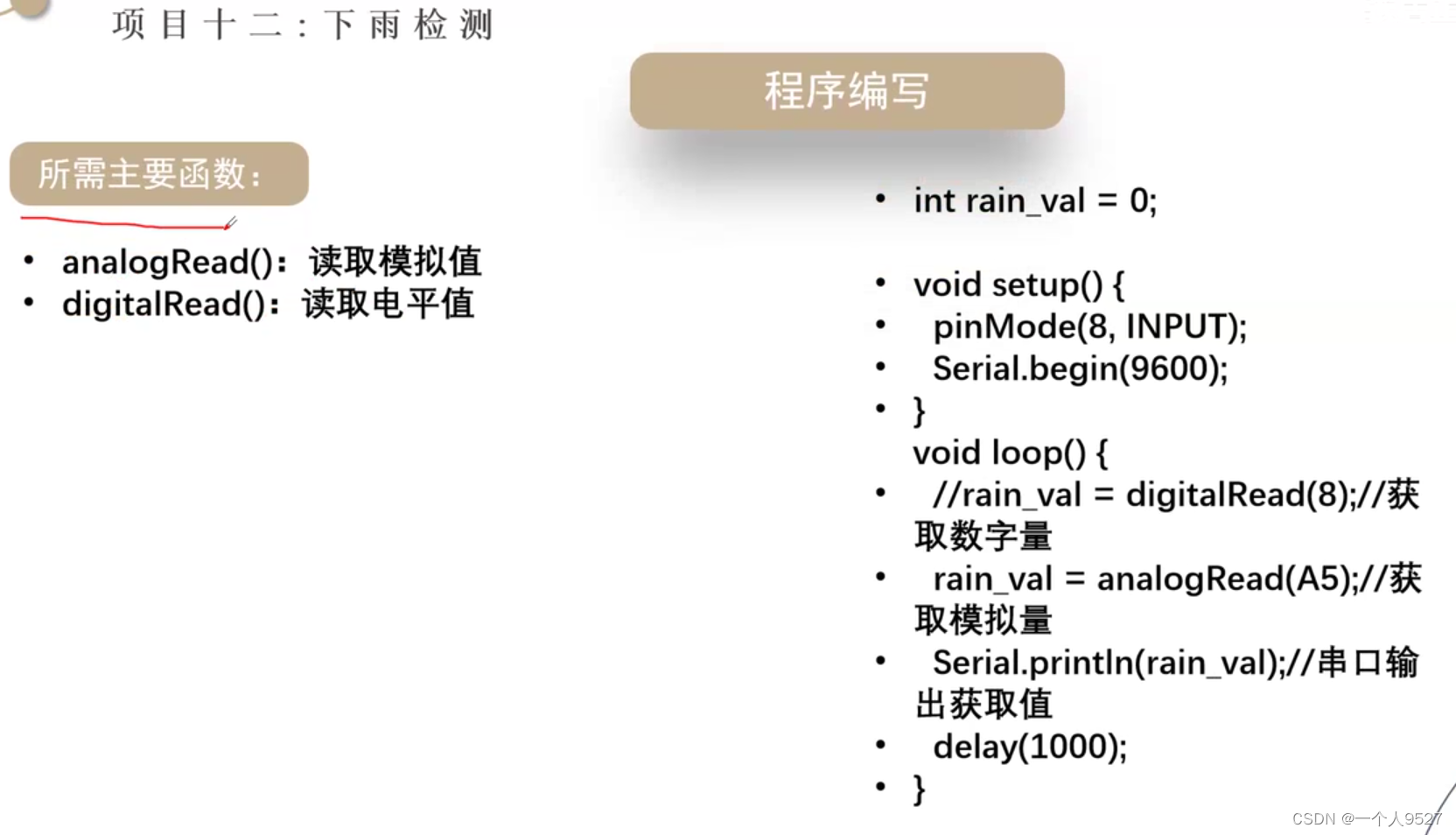
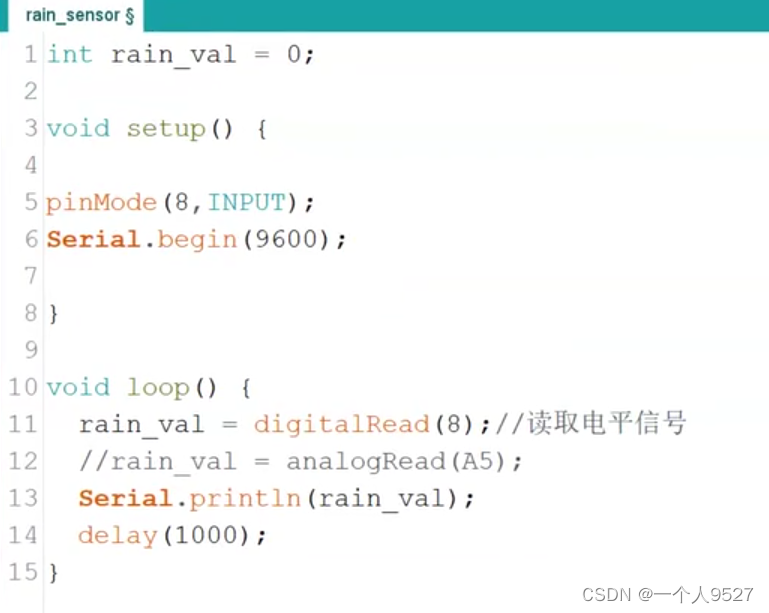
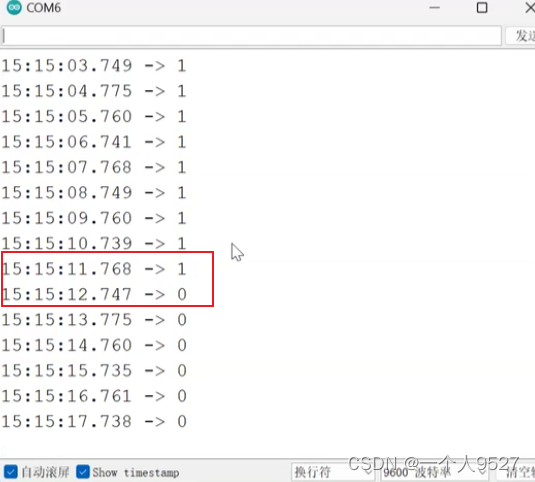
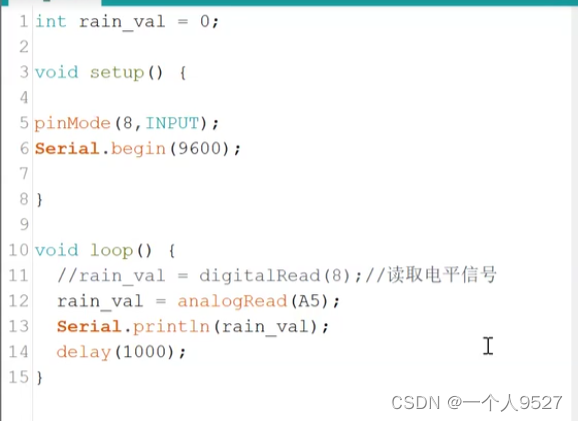
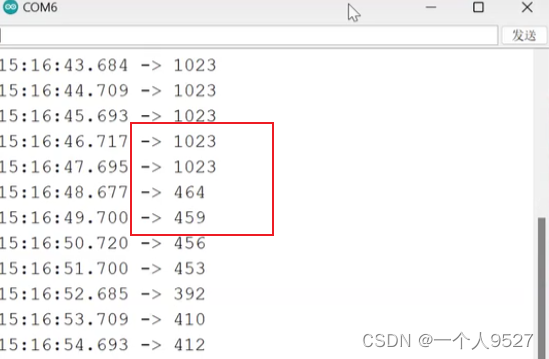
雨滴传感器
补充:如果没有水,板子传感器的模块有一个绿色发灯亮,如果有水,有两个绿灯亮。
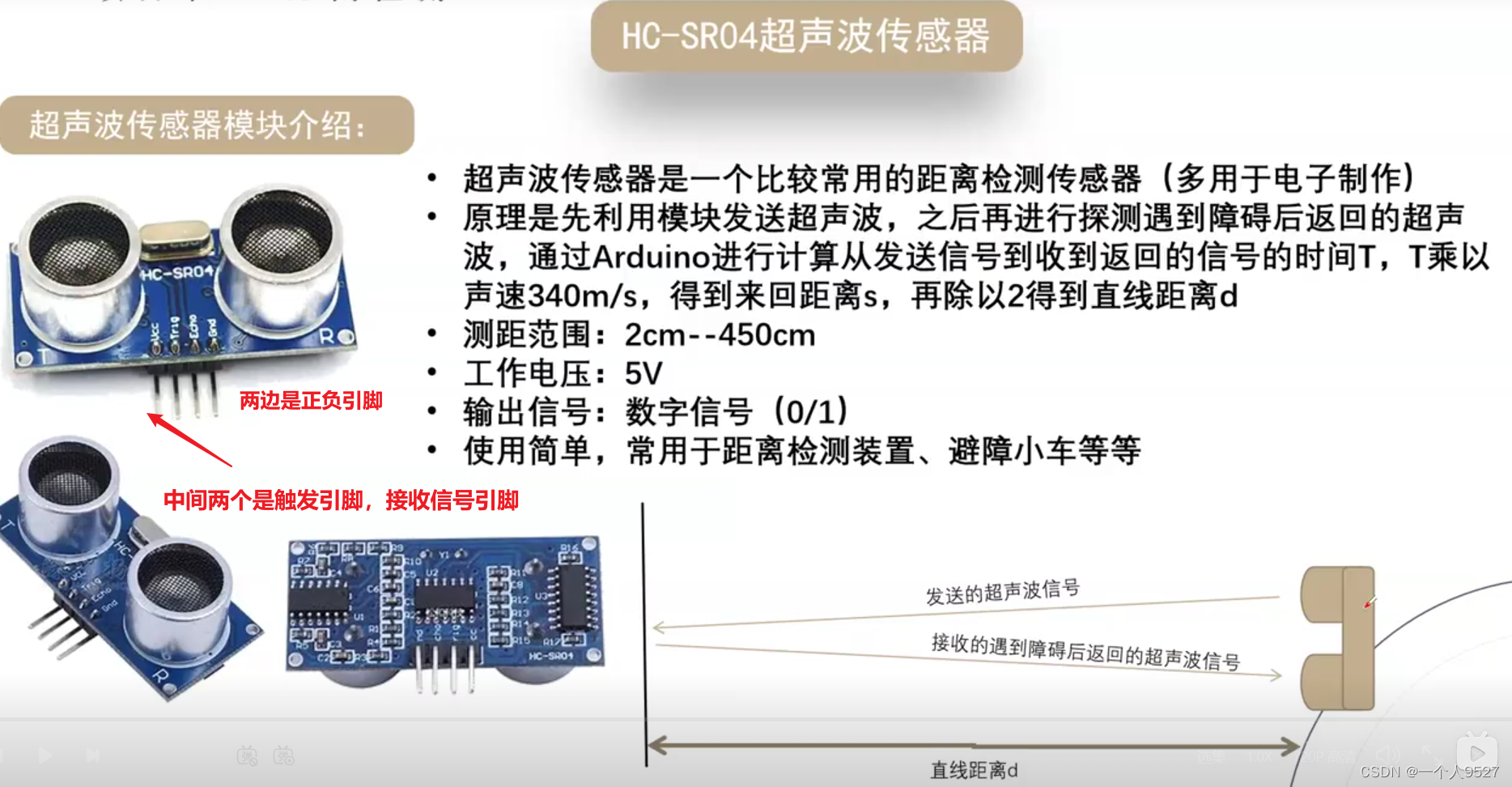
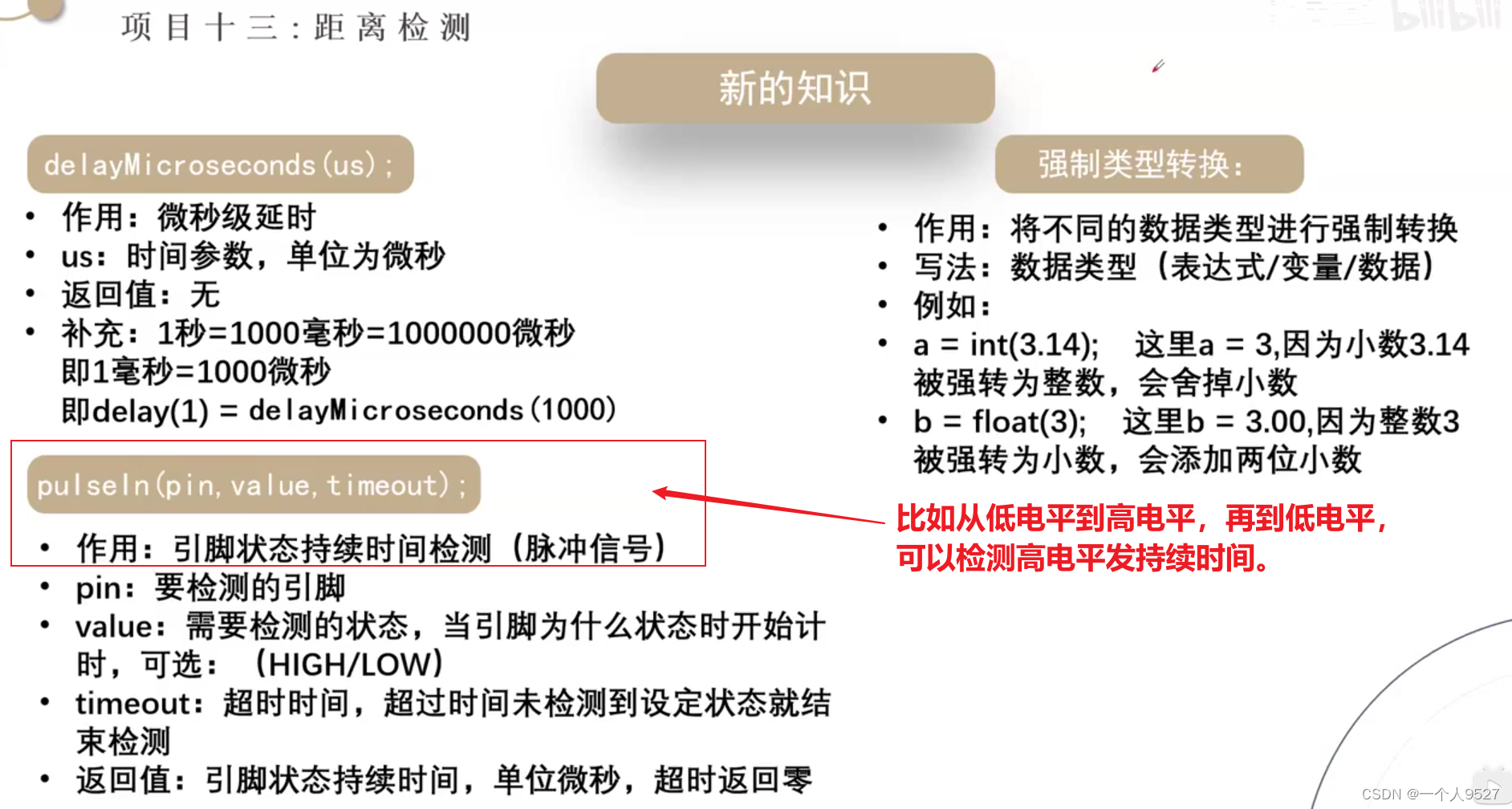
HC-SR04超声波传感器
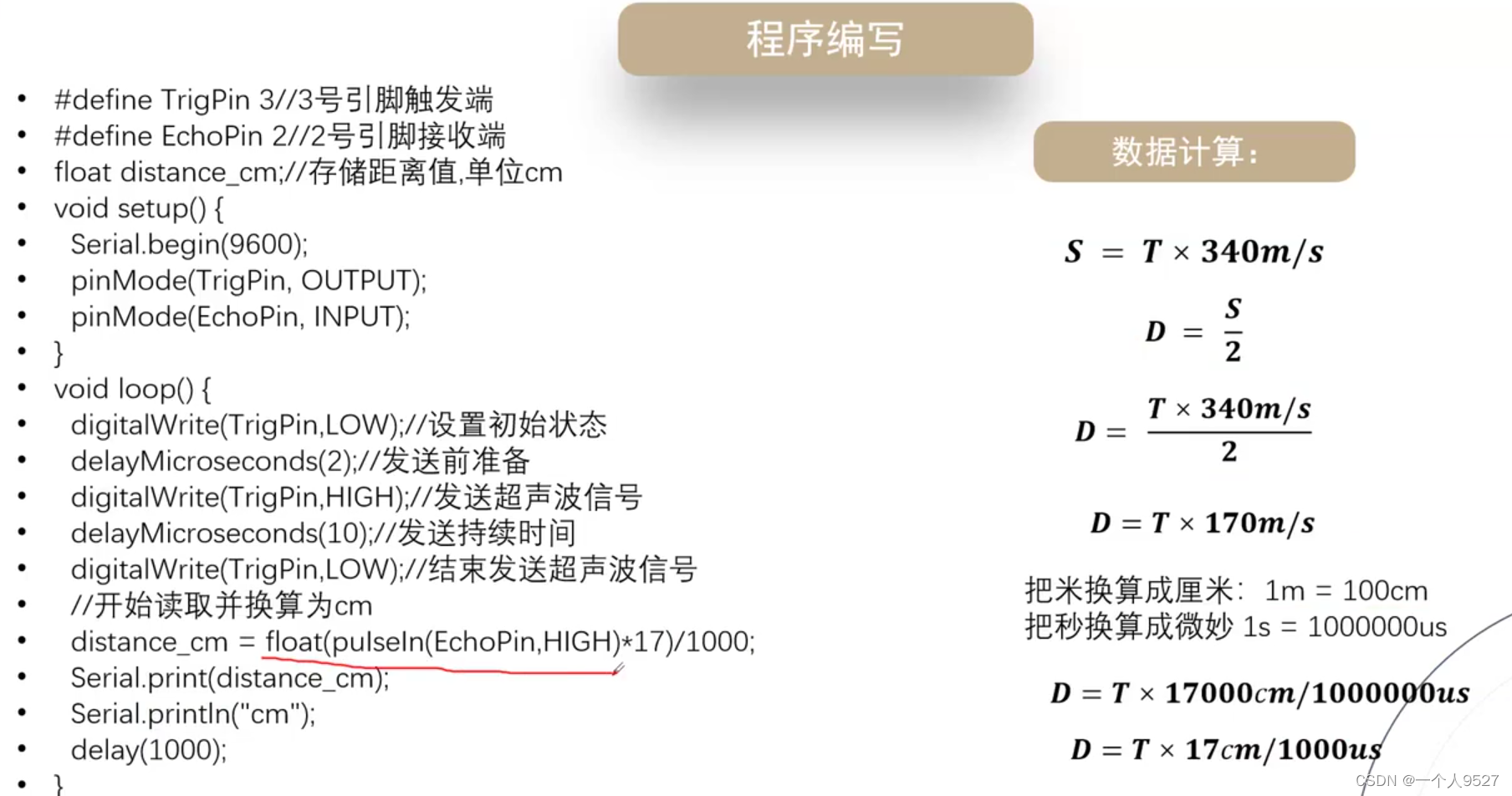
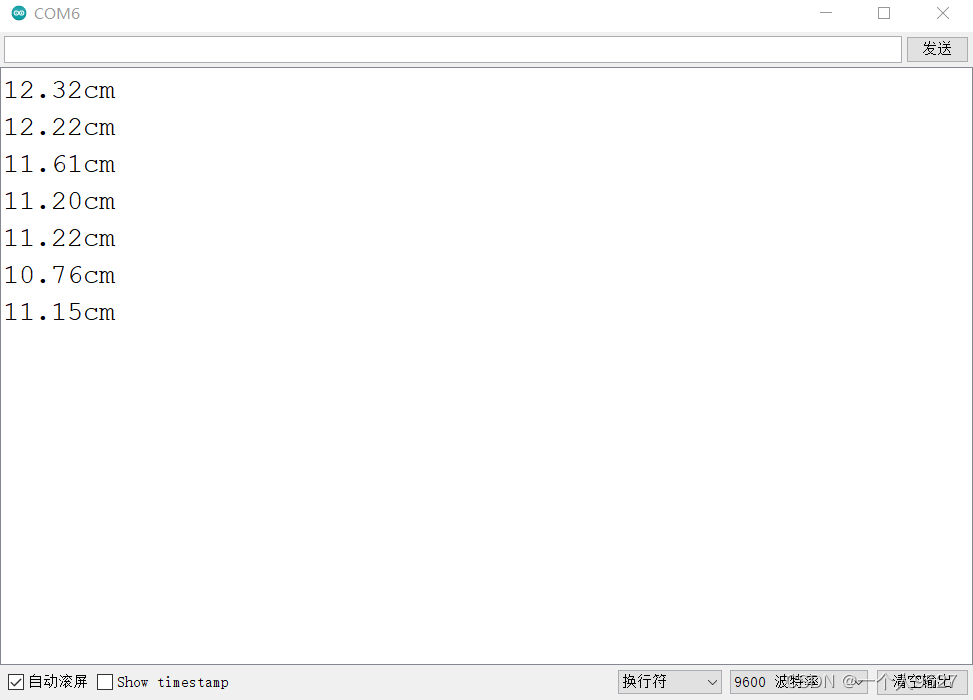
#define TrigPin 3 //3号引脚触发端 #define EchoPin 2 //2号引脚接收端 float distance_cm;//存储距离值,单位cm void setup() {Serial.begin(9600);pinMode(TrigPin, OUTPUT);pinMode(EchoPin, INPUT);}void loop() {digitalWrite(TrigPin,LOW);//设置初始状态delayMicroseconds(2);//发送前准备digitalWrite(TrigPin, HIGH); //发送超声波信号delayMicroseconds(10);//发送持续时间digitalWrite(TrigPin, LOW); //结束发送超声波信号//开始读取并换算为cmdistance_cm = float(pulseIn(EchoPin, HIGH) * 17) / 1000;Serial.print(distance_cm);Serial.println("cm");delay(1000);}
传感器总结课
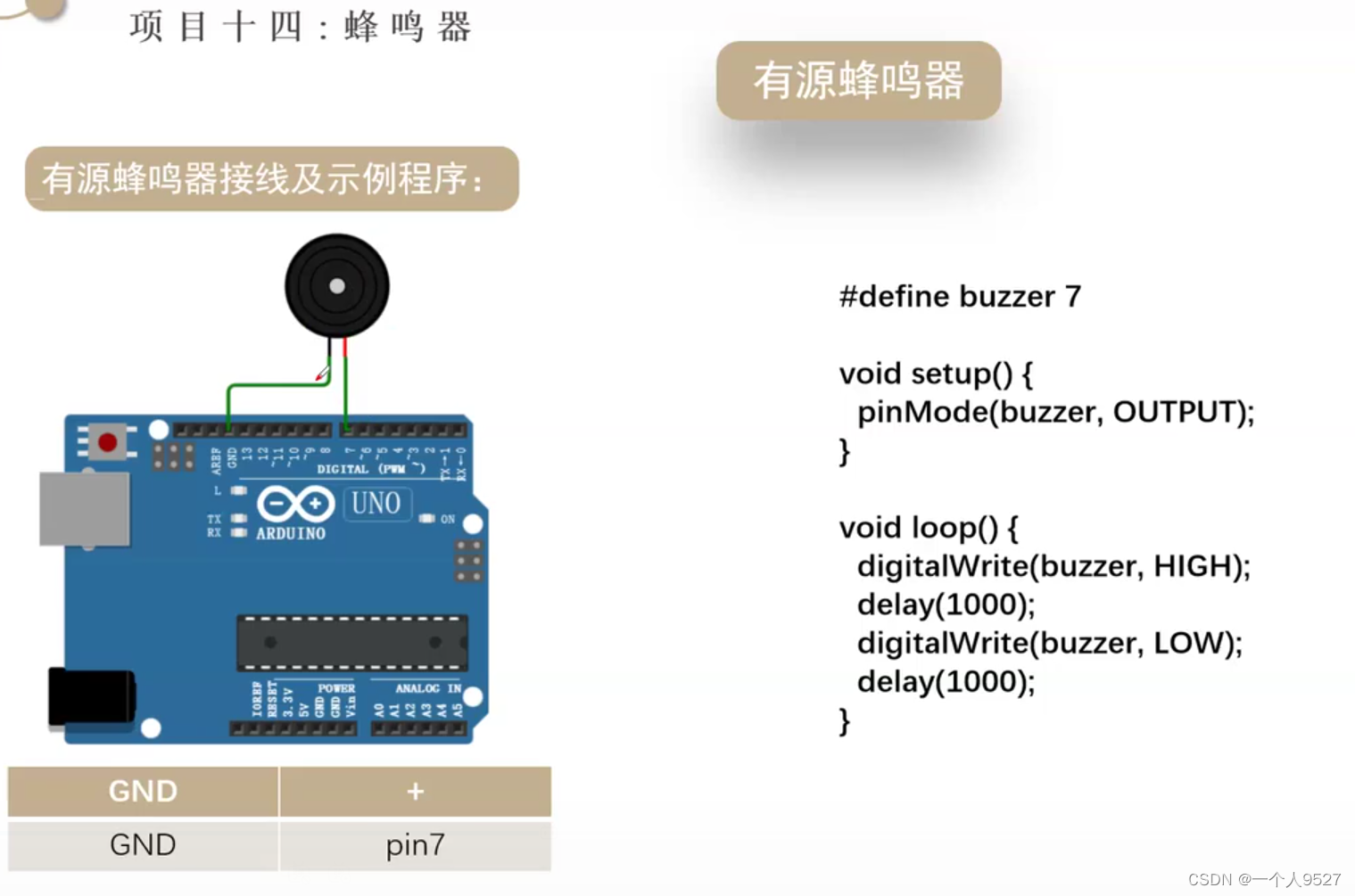
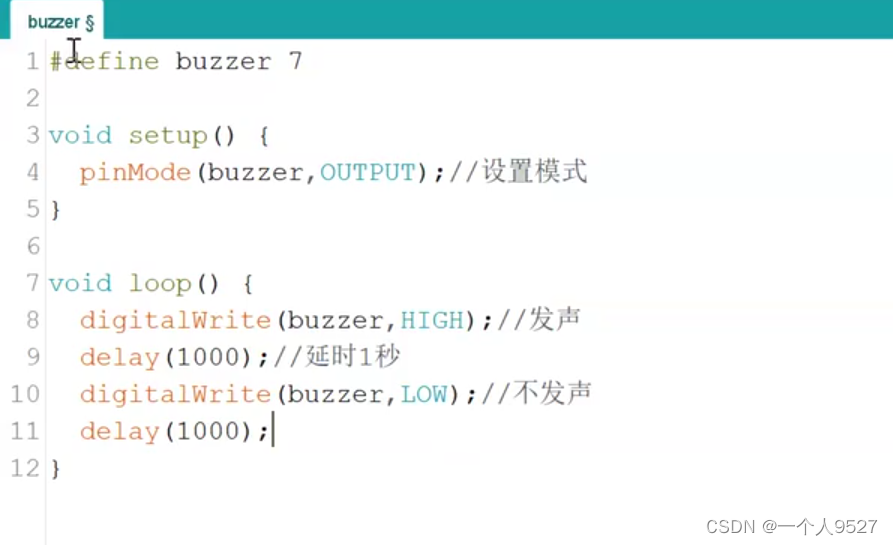
蜂鸣器
#define buzzer 7void setup() {pinMode(buzzer, OUTPUT); //设置模式 }void loop() {digitalWrite(buzzer, HIGH); //发声delay(1000);//延时1秒digitalWrite(buzzer, LOW); //不发声delay(1000); }
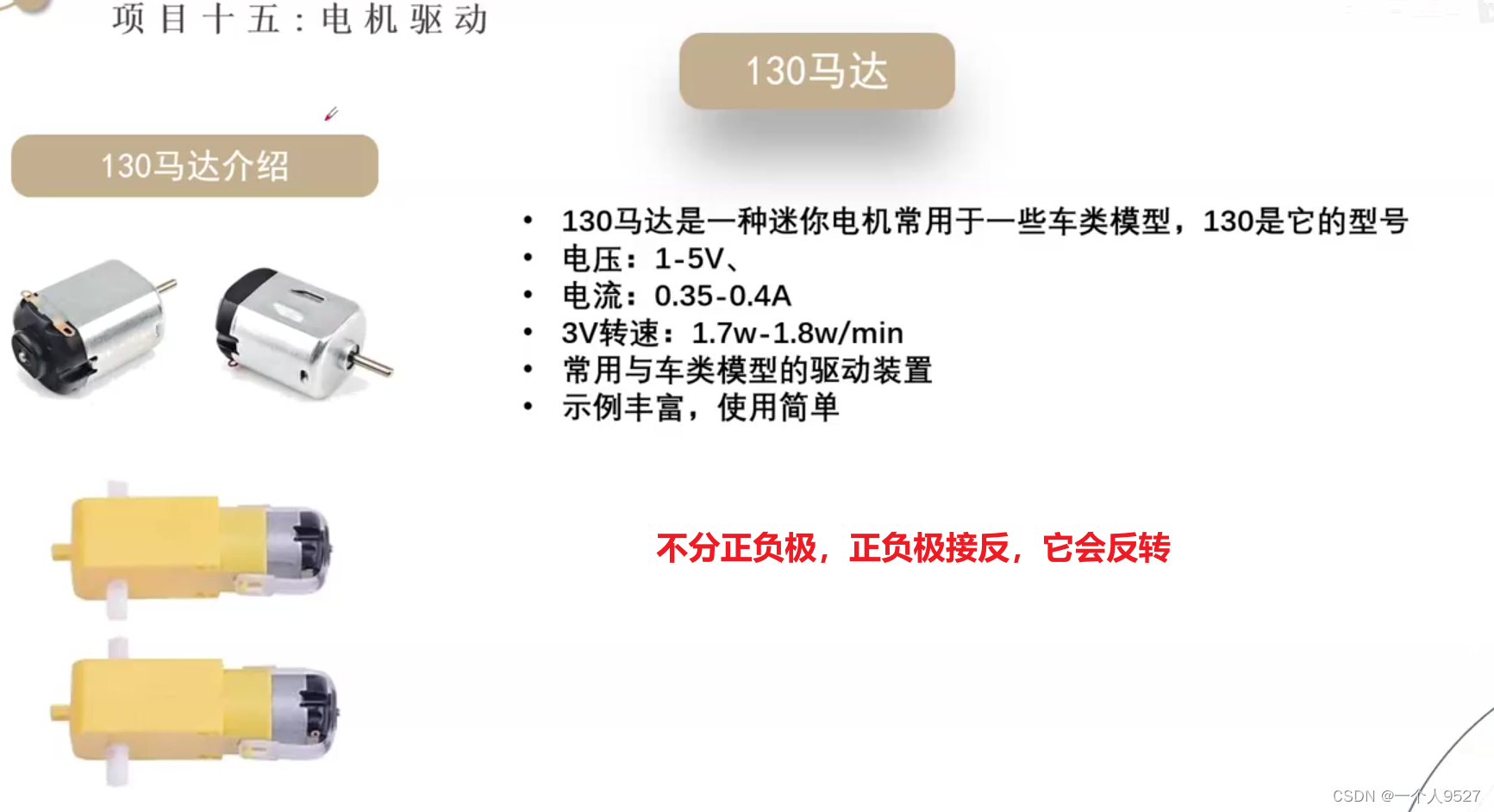
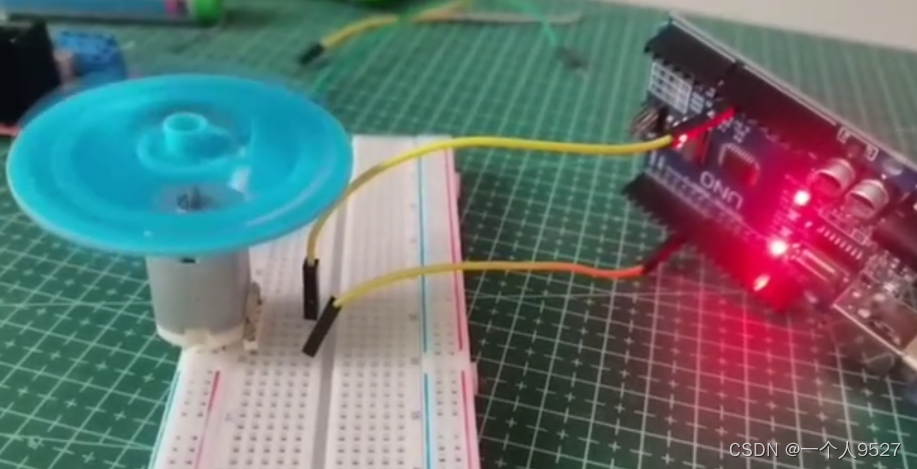
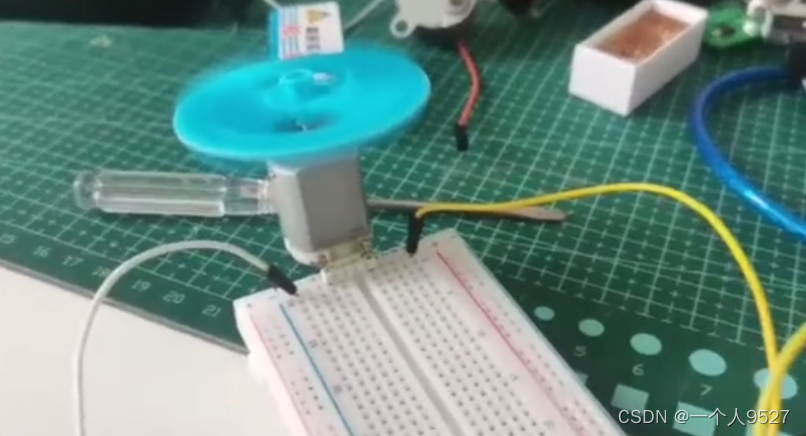
130马达
有时候需要推一下,它才会转,因为开发板电流太小了。
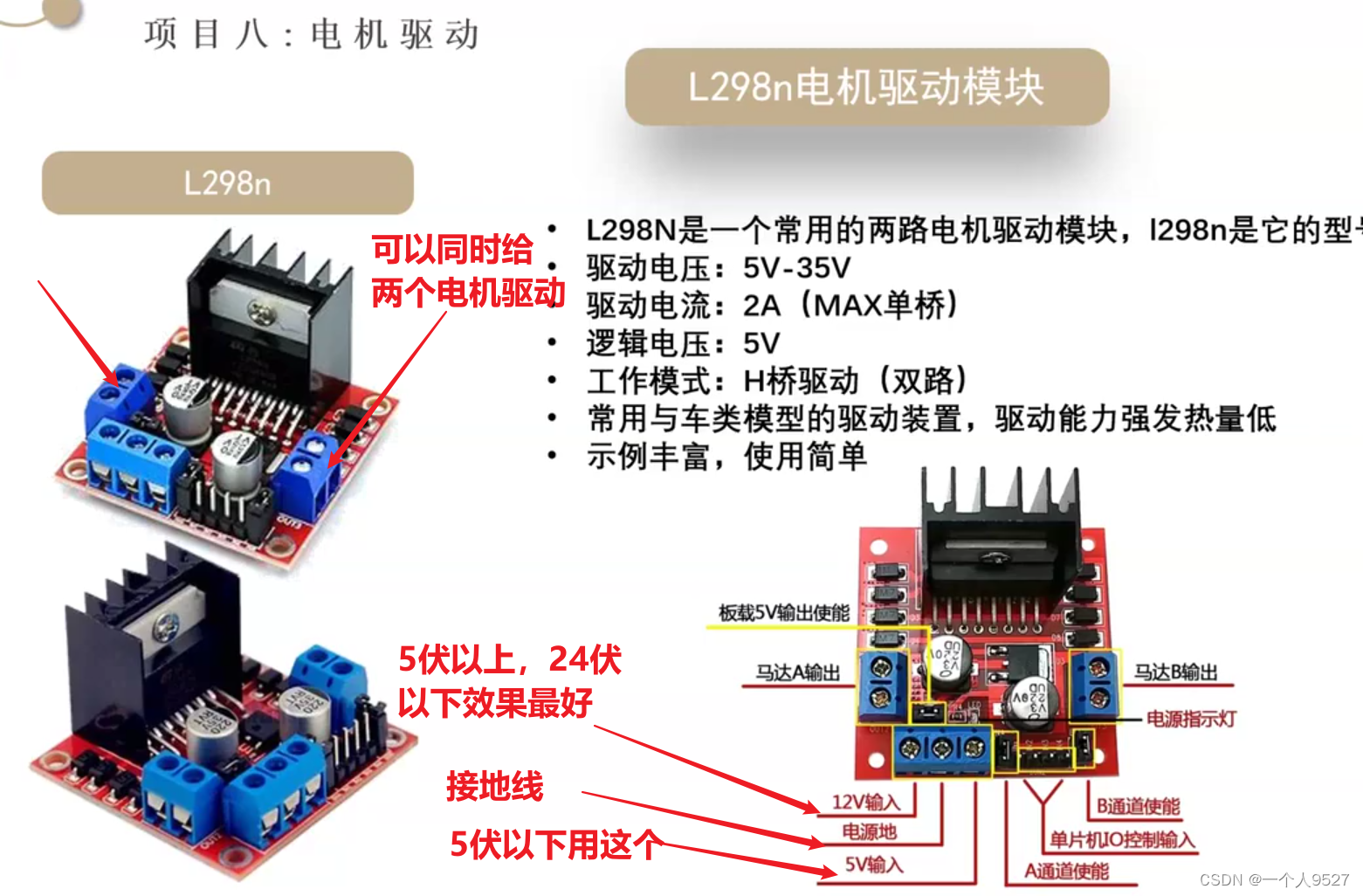
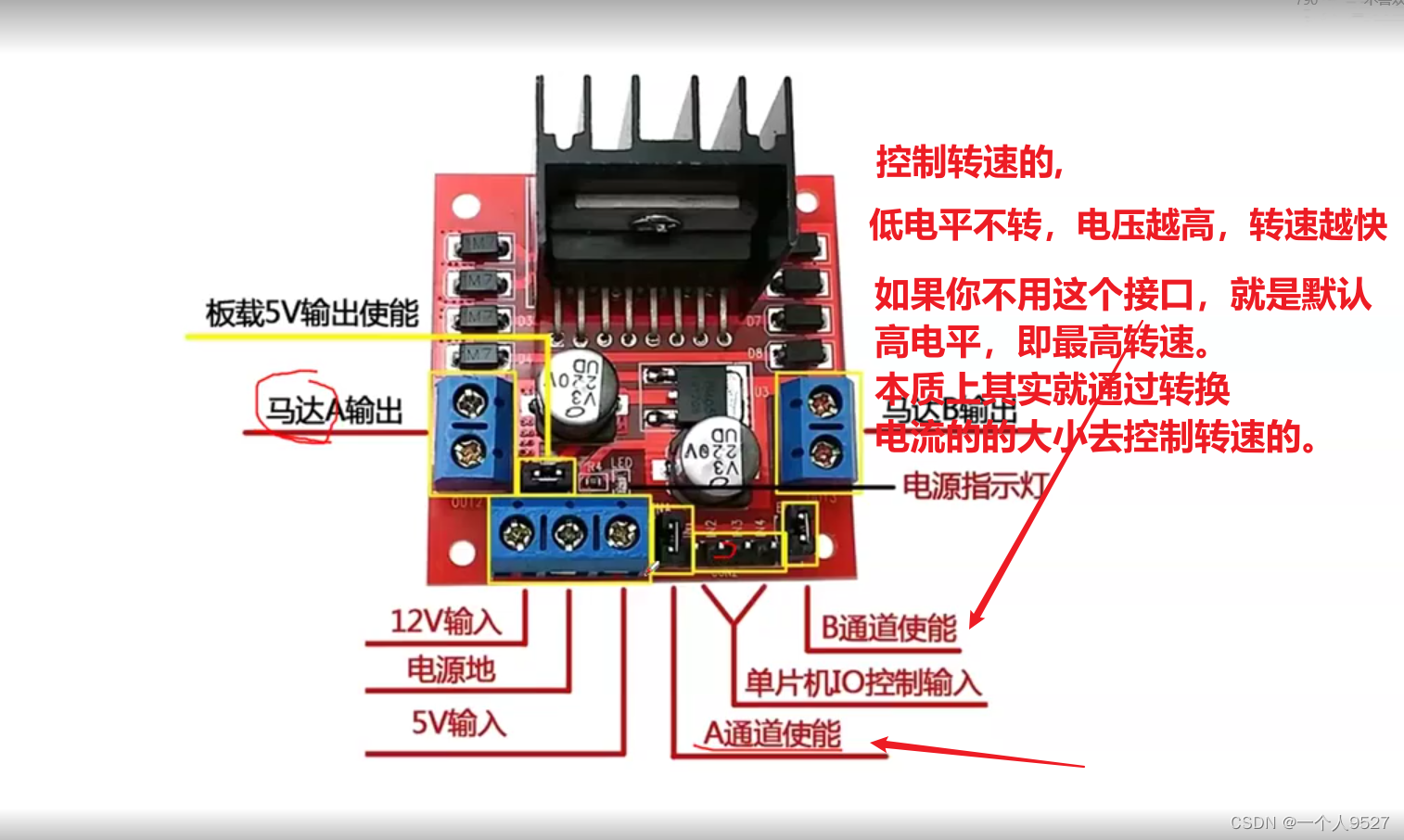
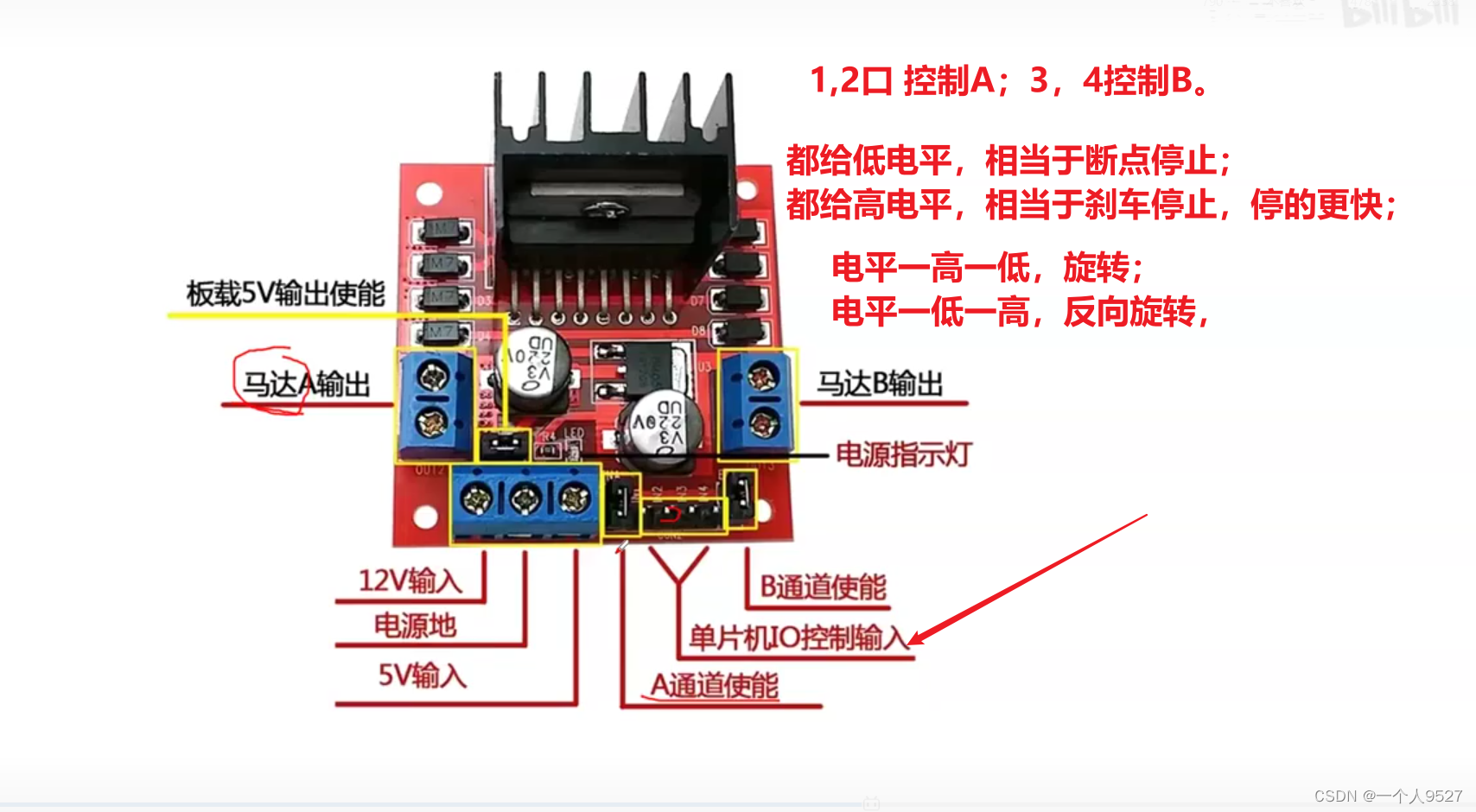
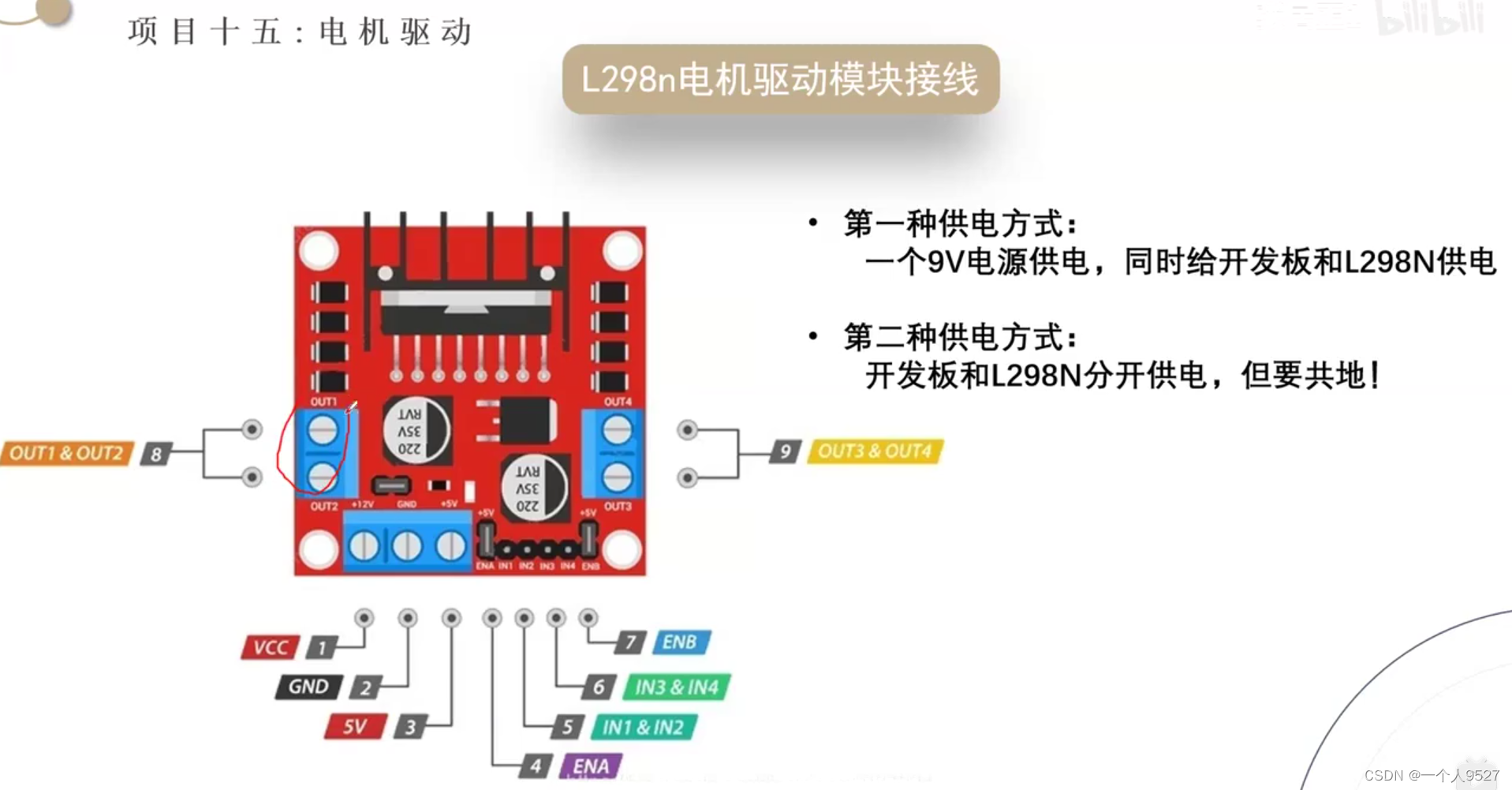
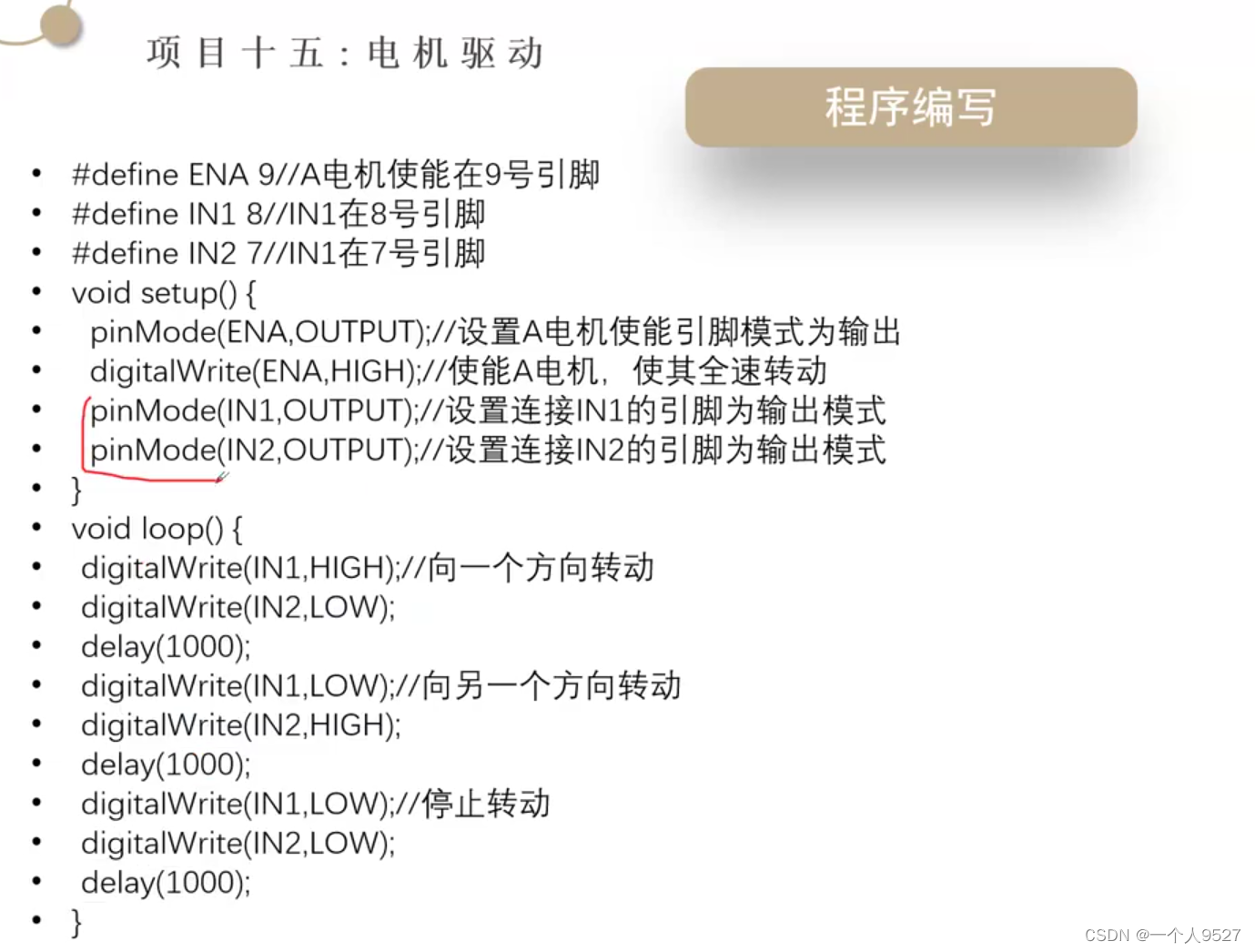
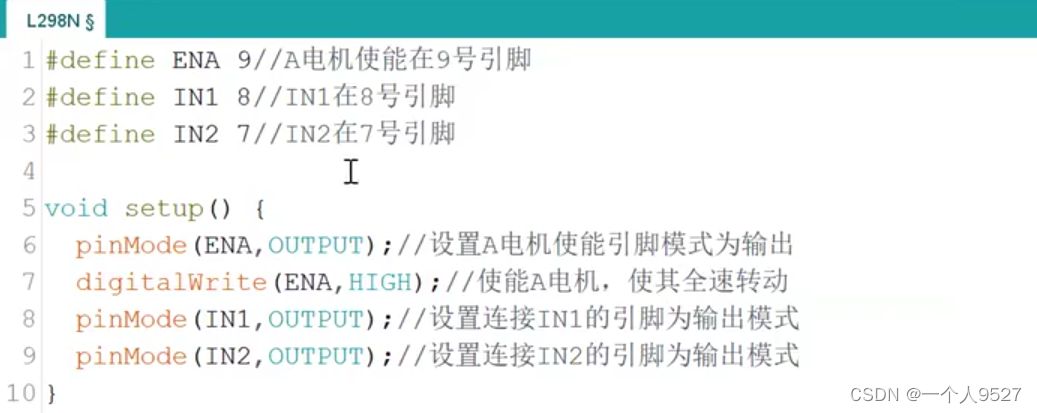
L298n电机驱动模块
A,B通道使能上面有个跳线帽,如果你没有拔掉,不用这个,然后就是默认电机全速旋转。
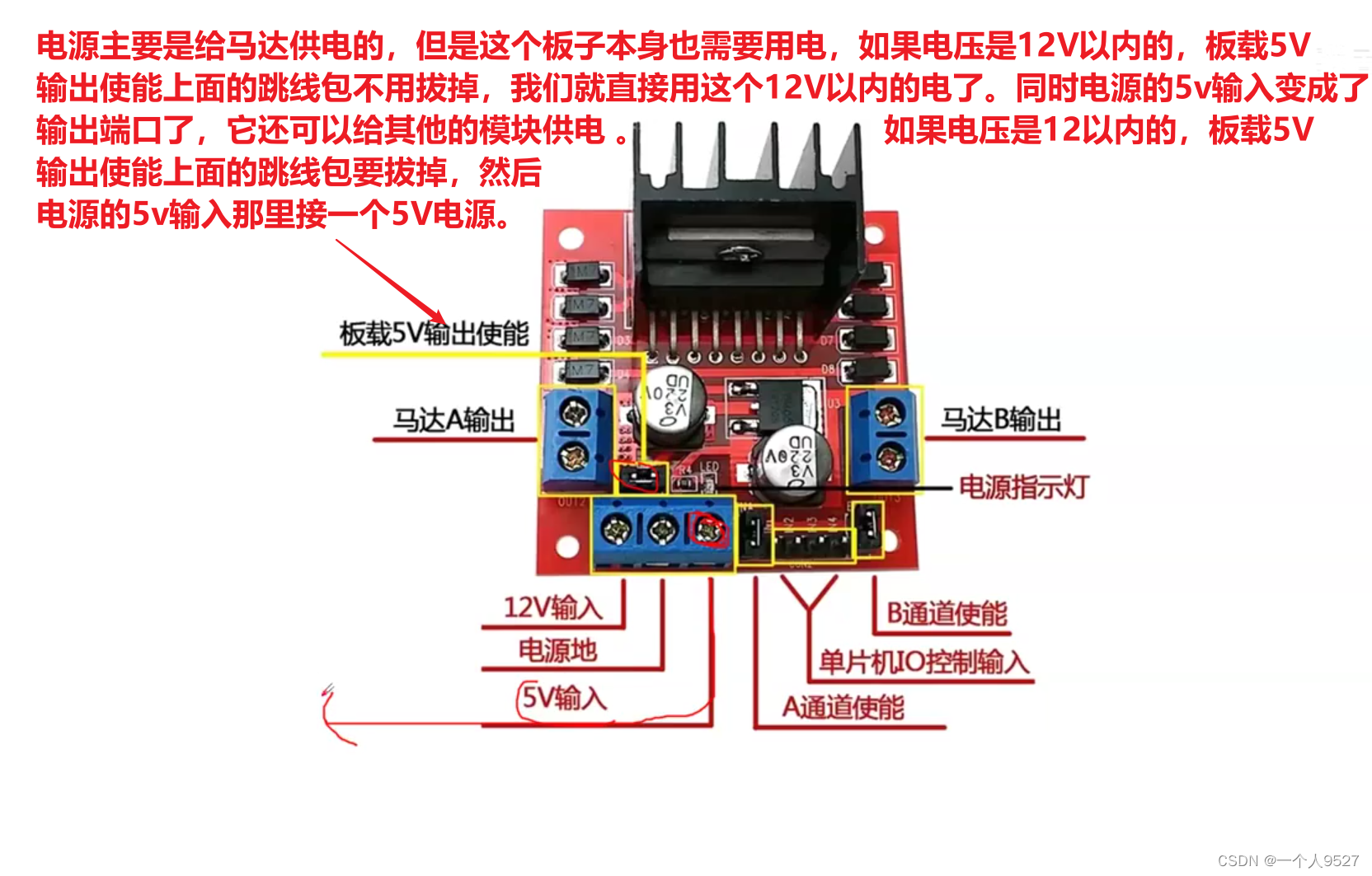
不是跳线包,是跳线帽,如果跳线帽没有拔掉,它会把12伏以下的点转成5伏的电给我们这个板供电。
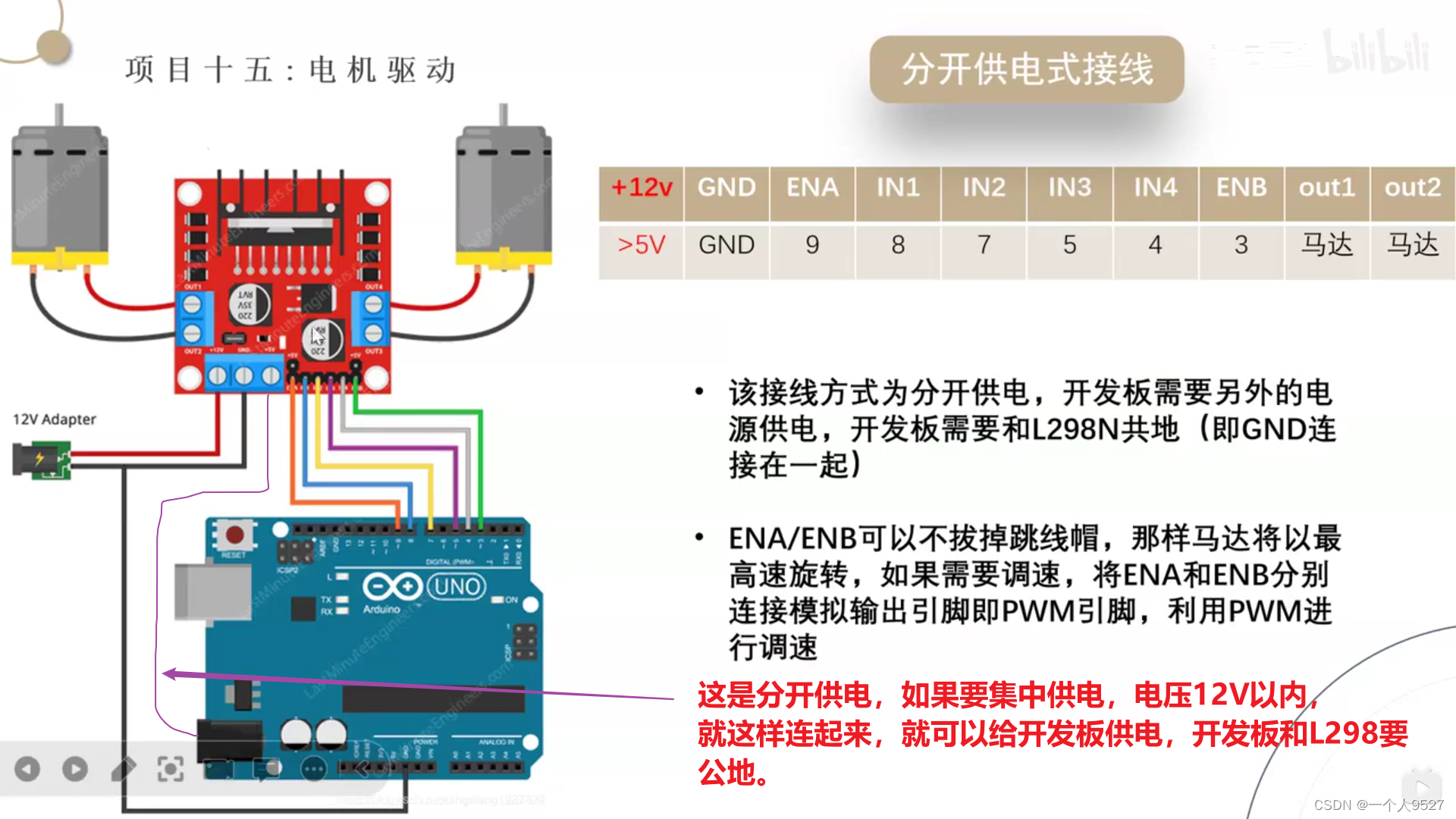
这种方式开发板还要单独找个电源供电。
两种方式 都要共地
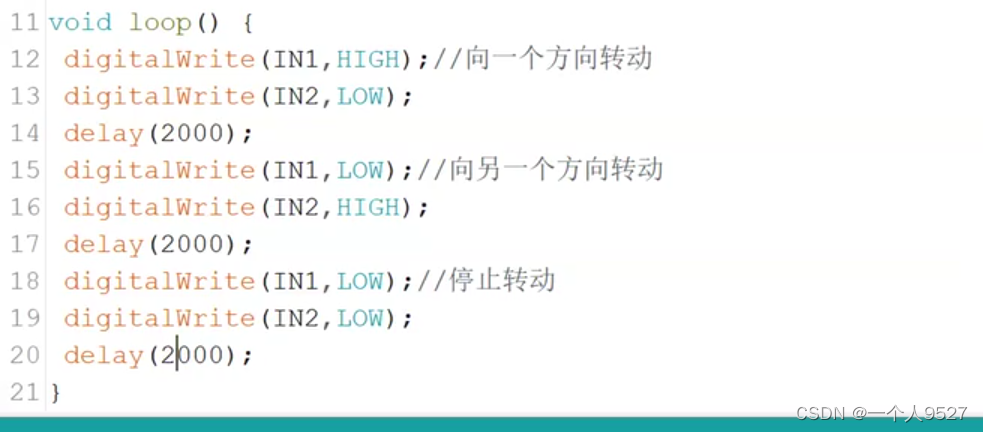
正转,停两秒,反转,停两秒。
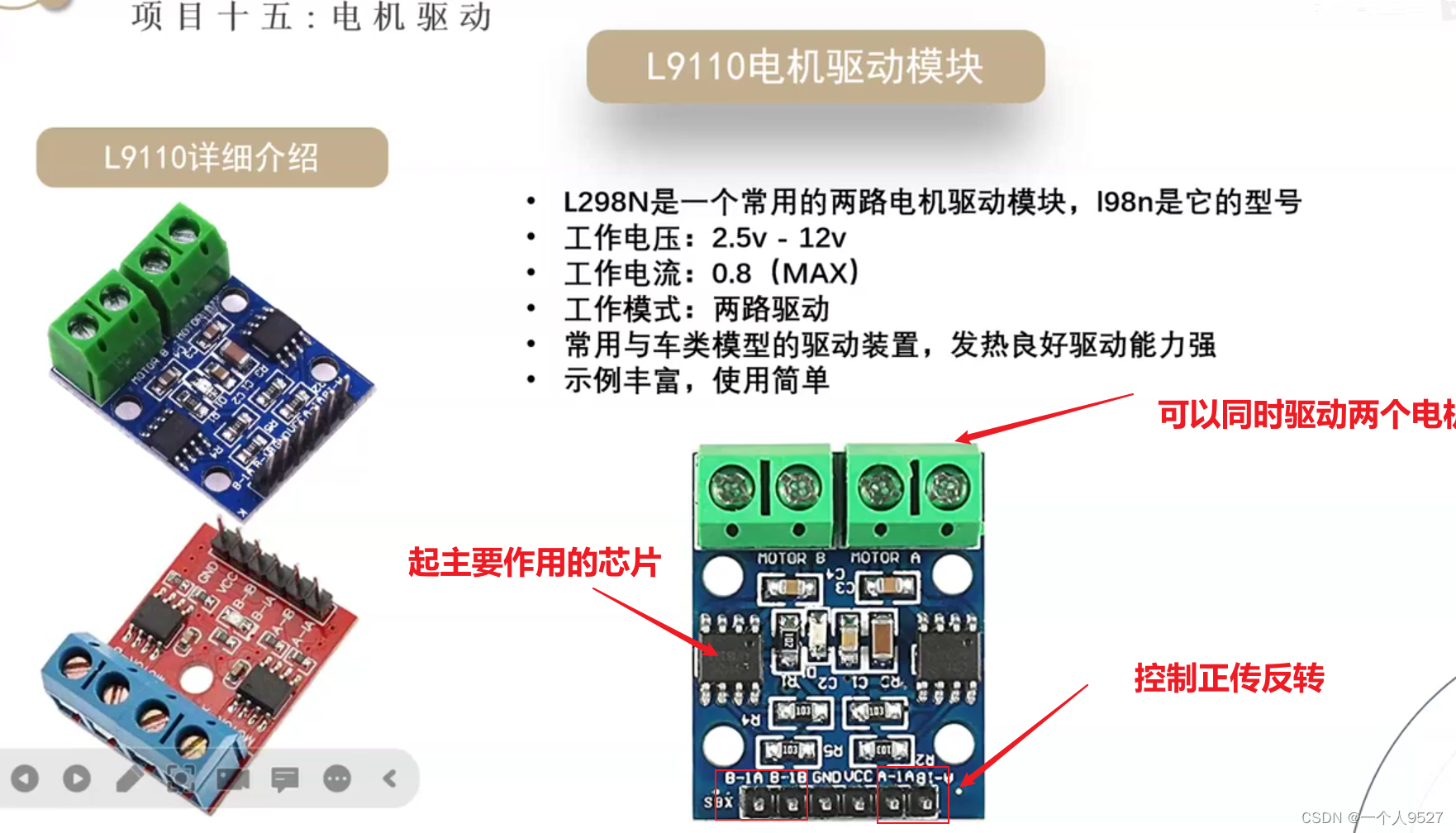
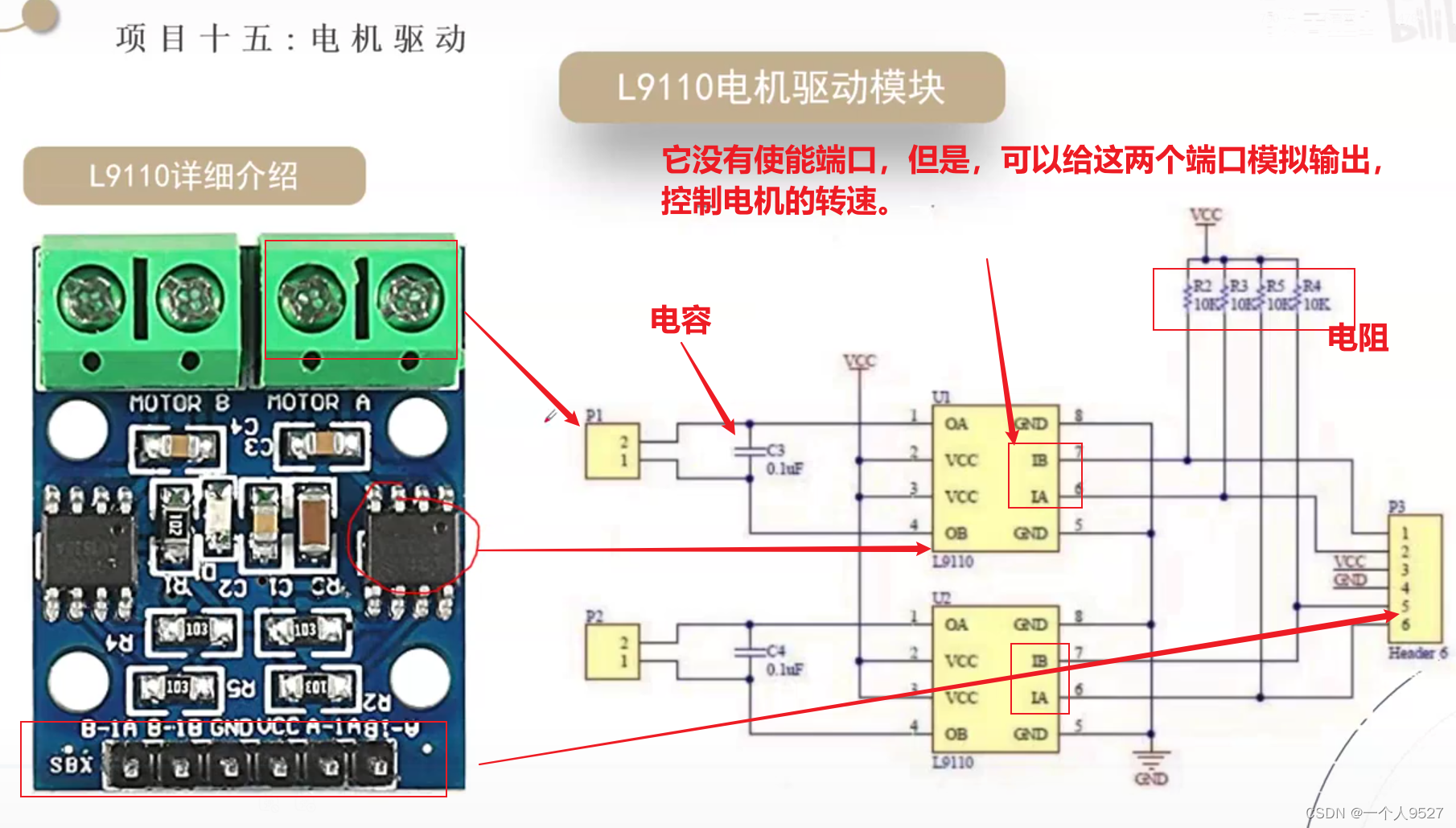
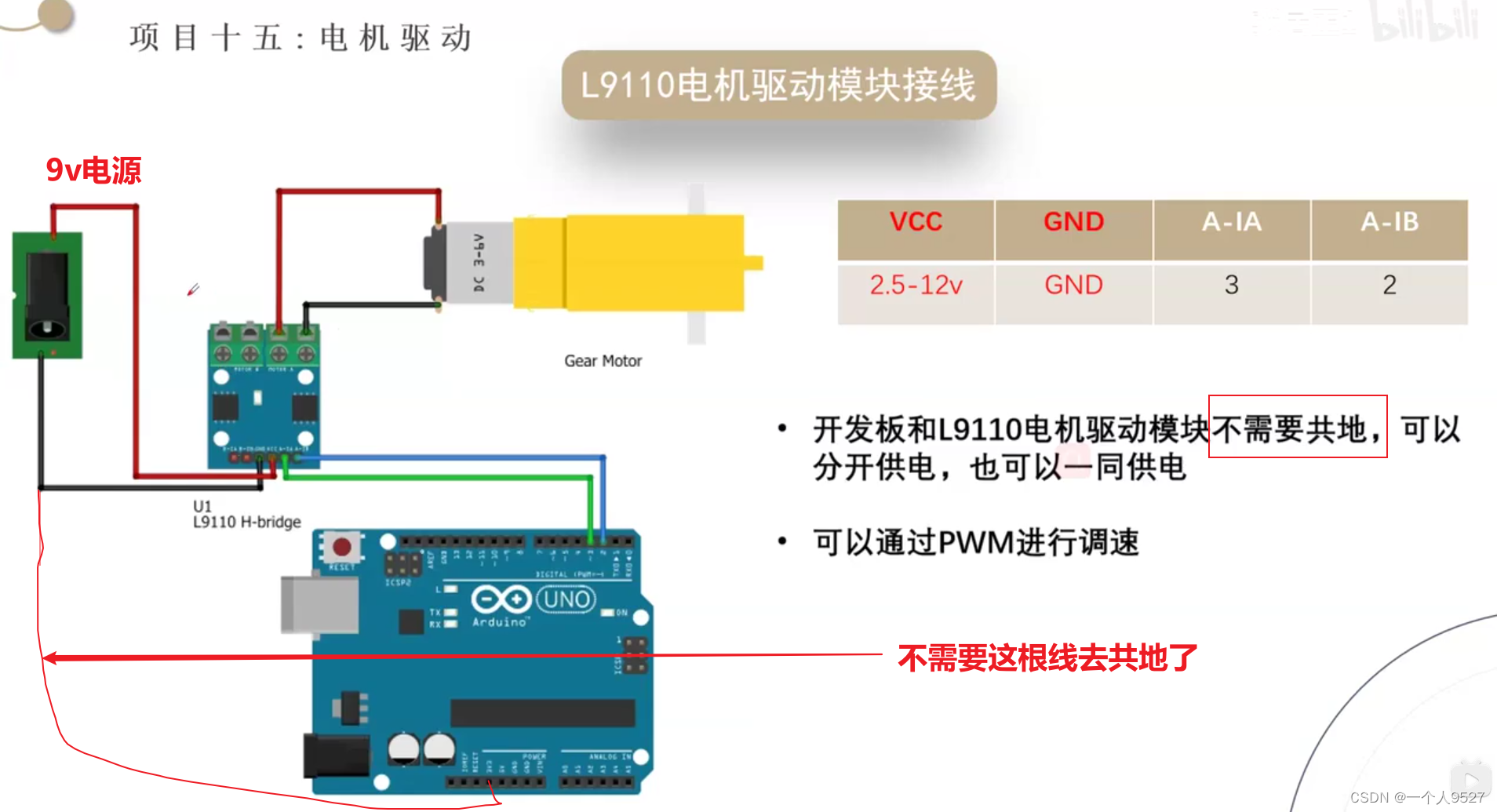
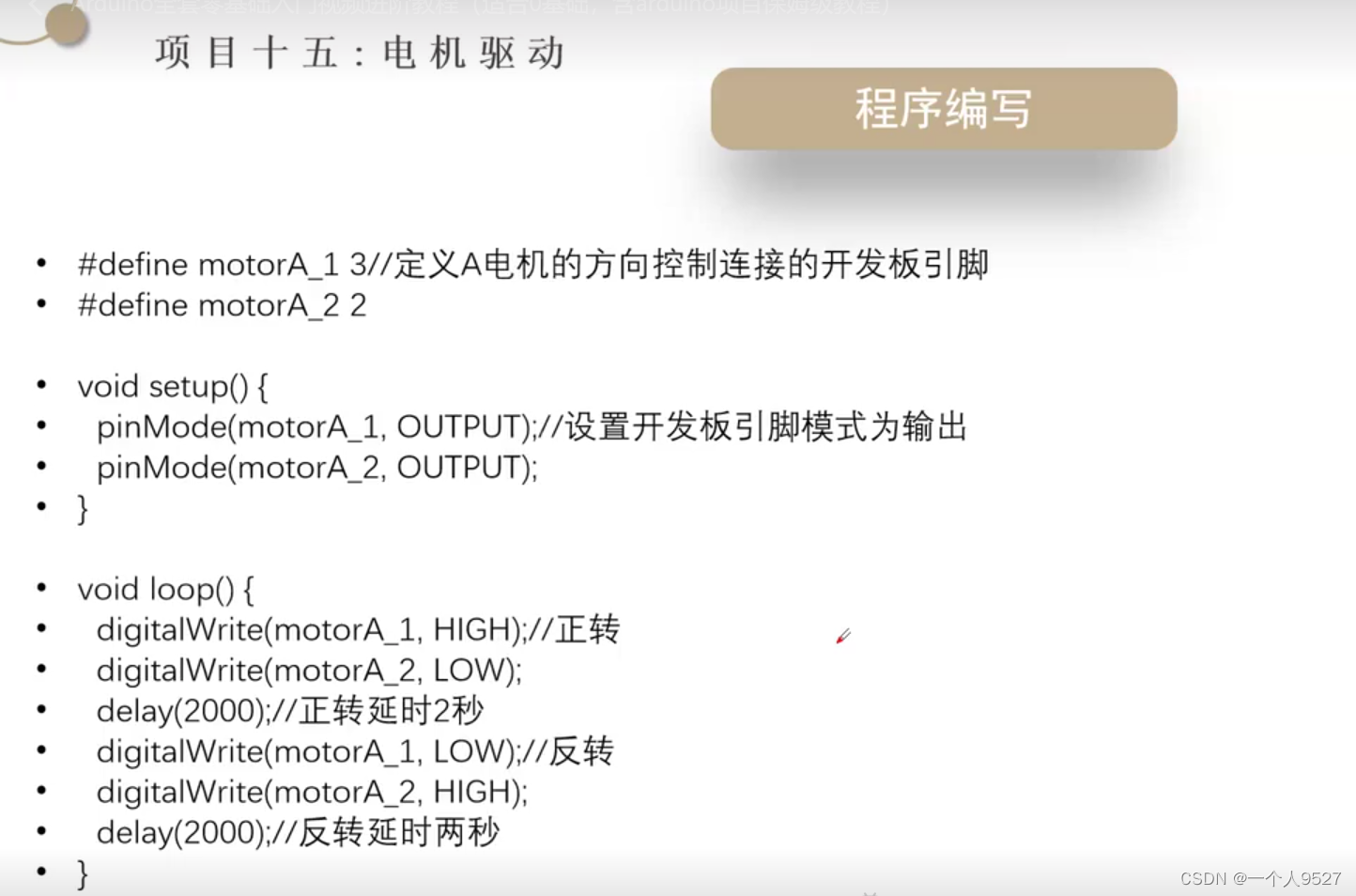
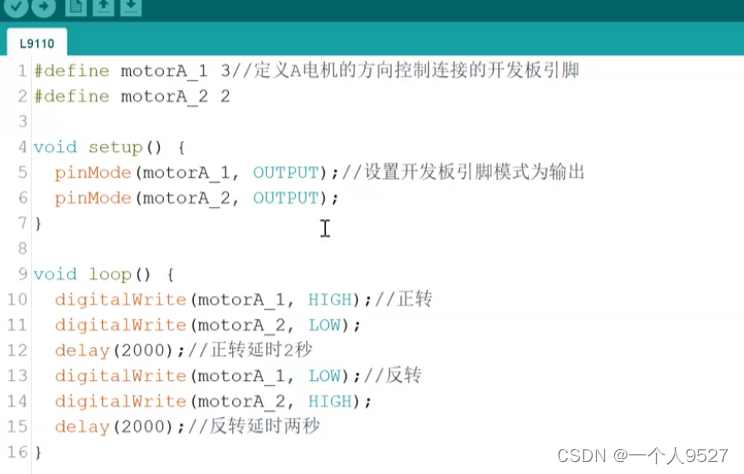
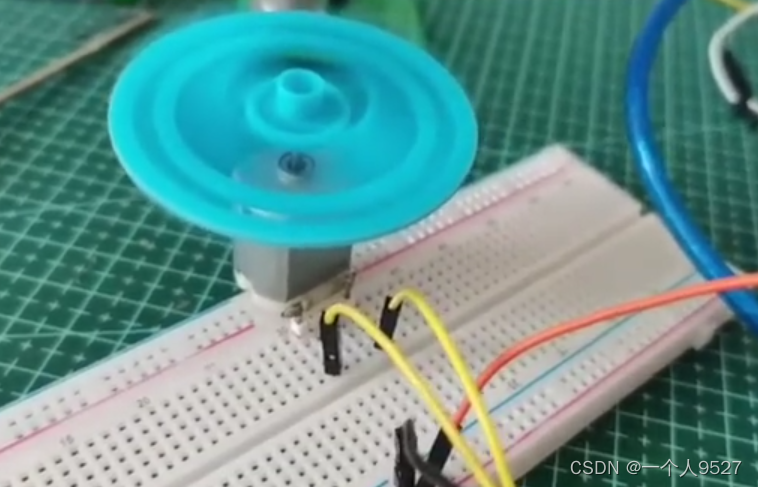
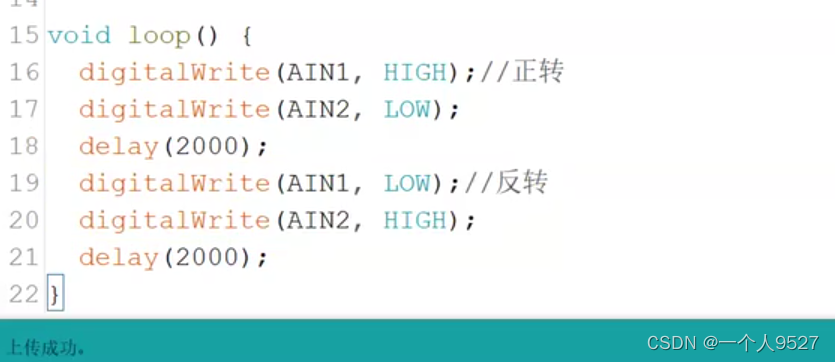
L9110 电机驱动模块
正转,停两秒,反转,停两秒。
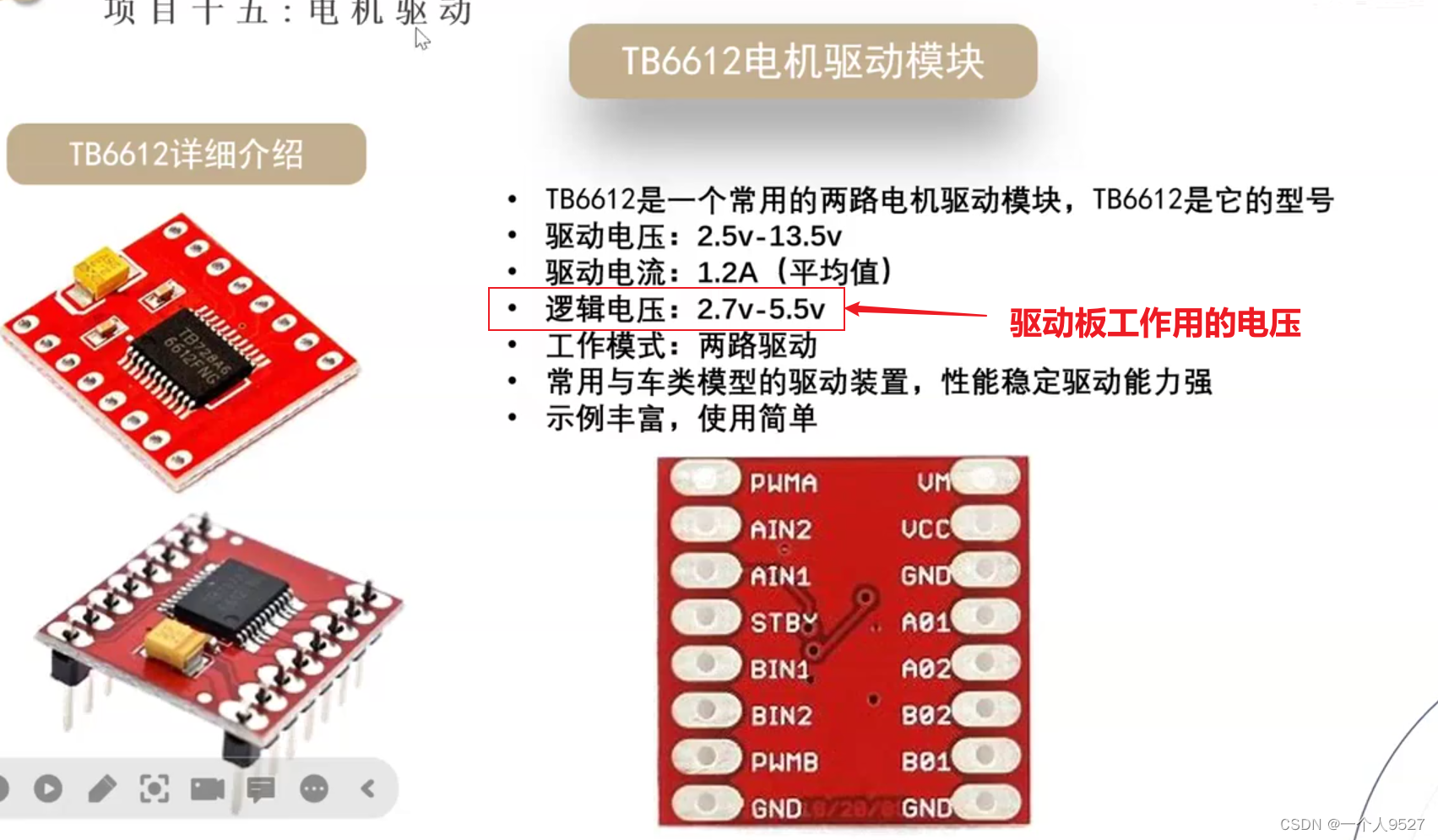
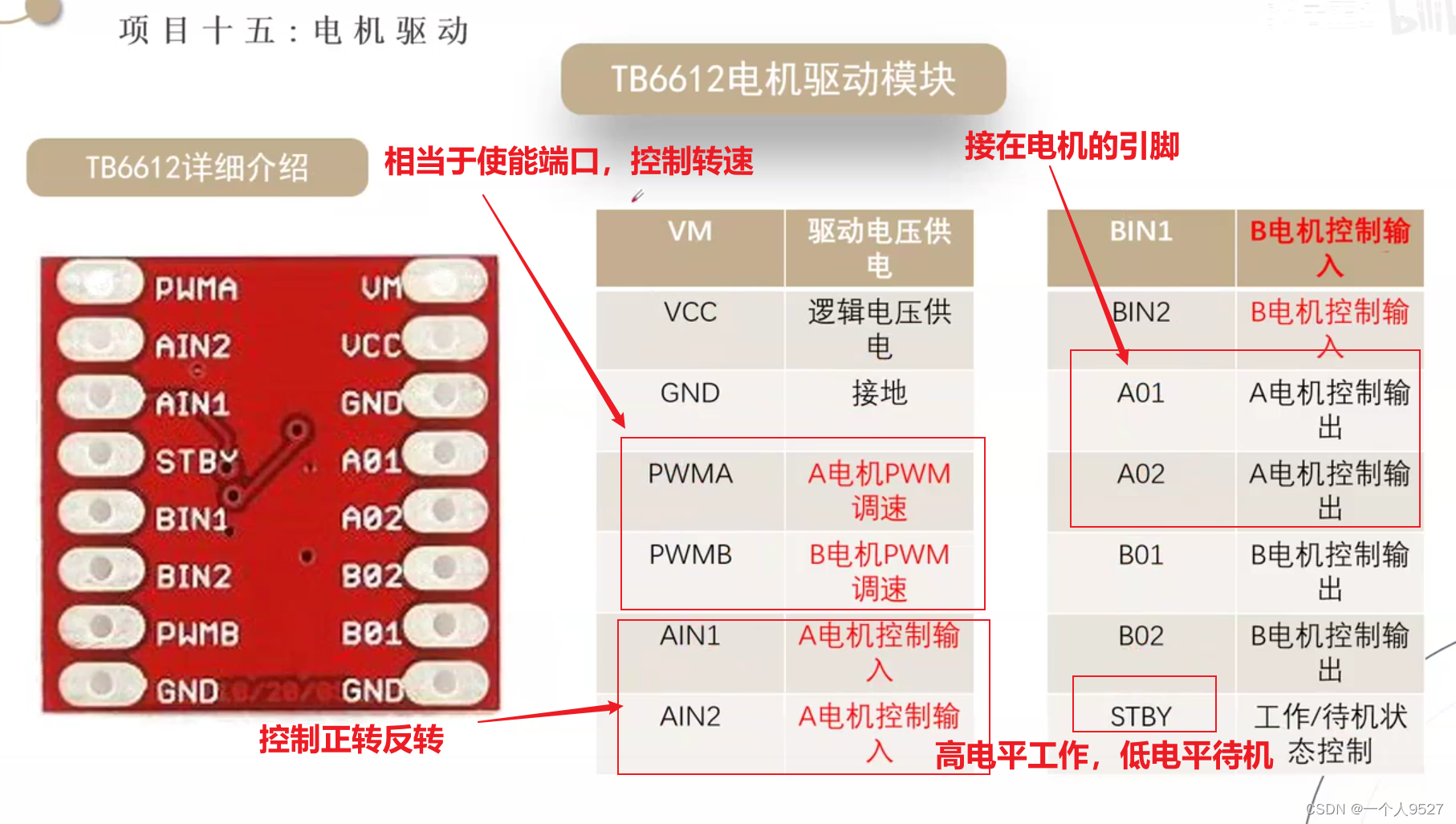
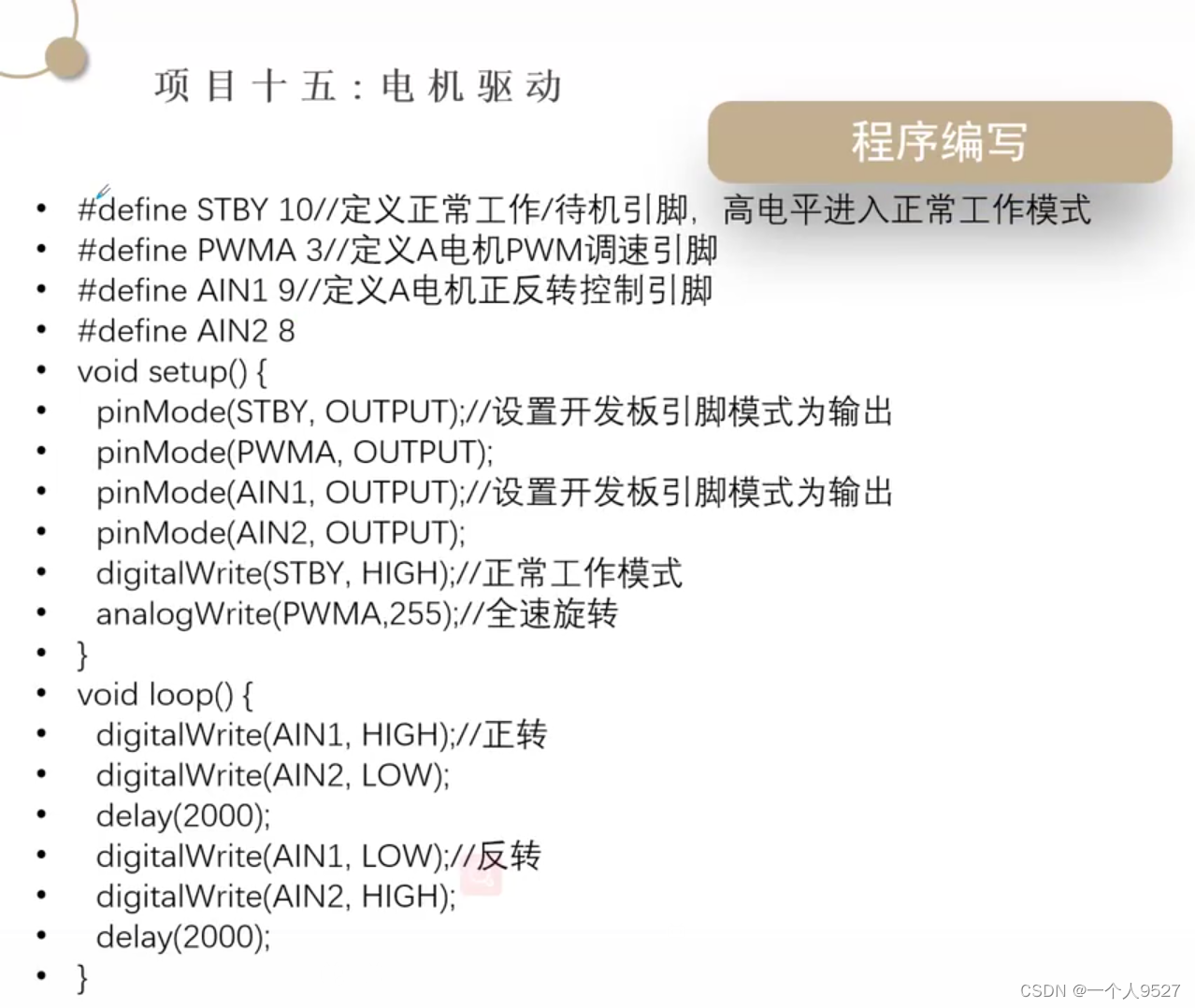
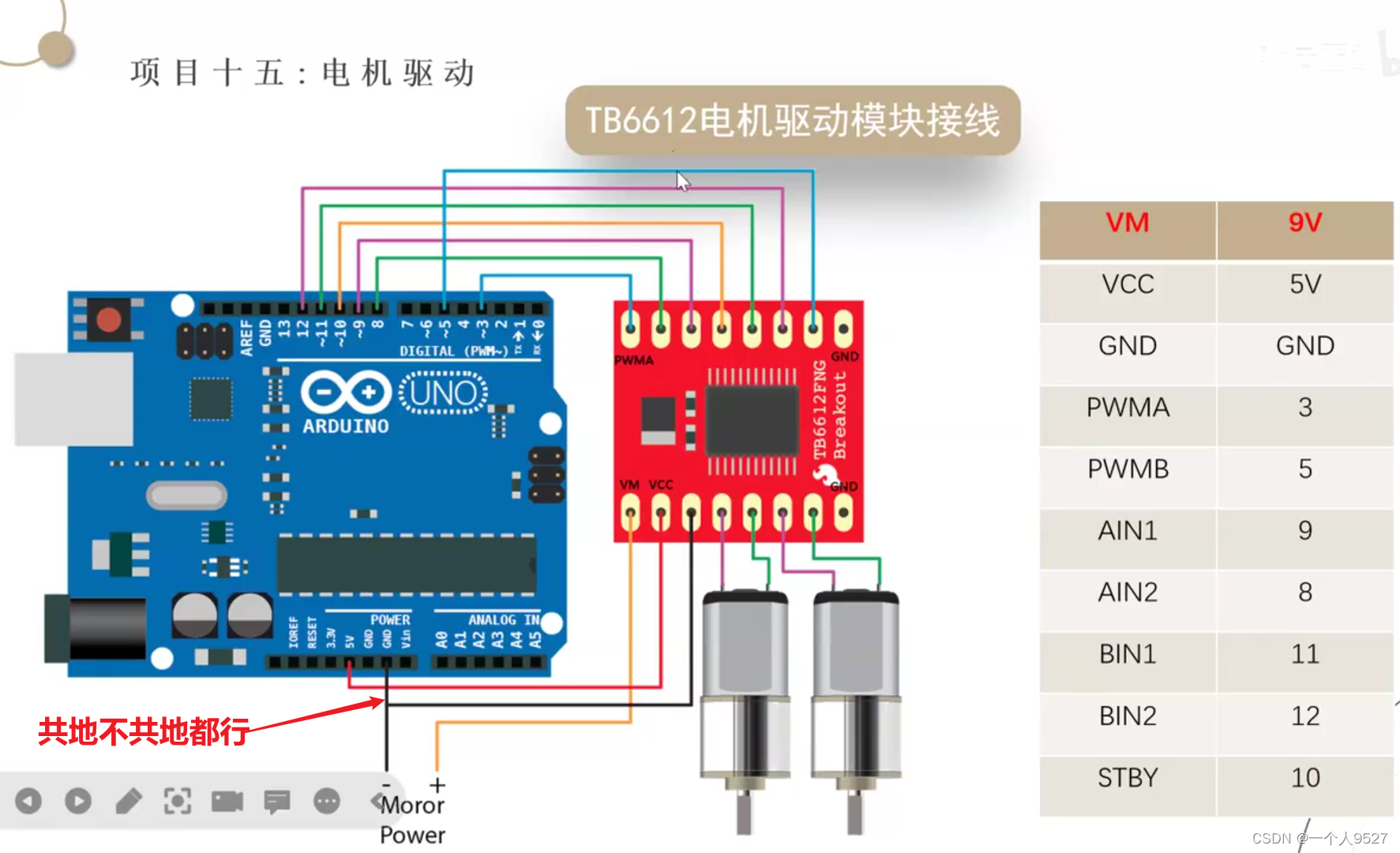
TB6612电机驱动模块
正转,停两秒,反转,停两秒。
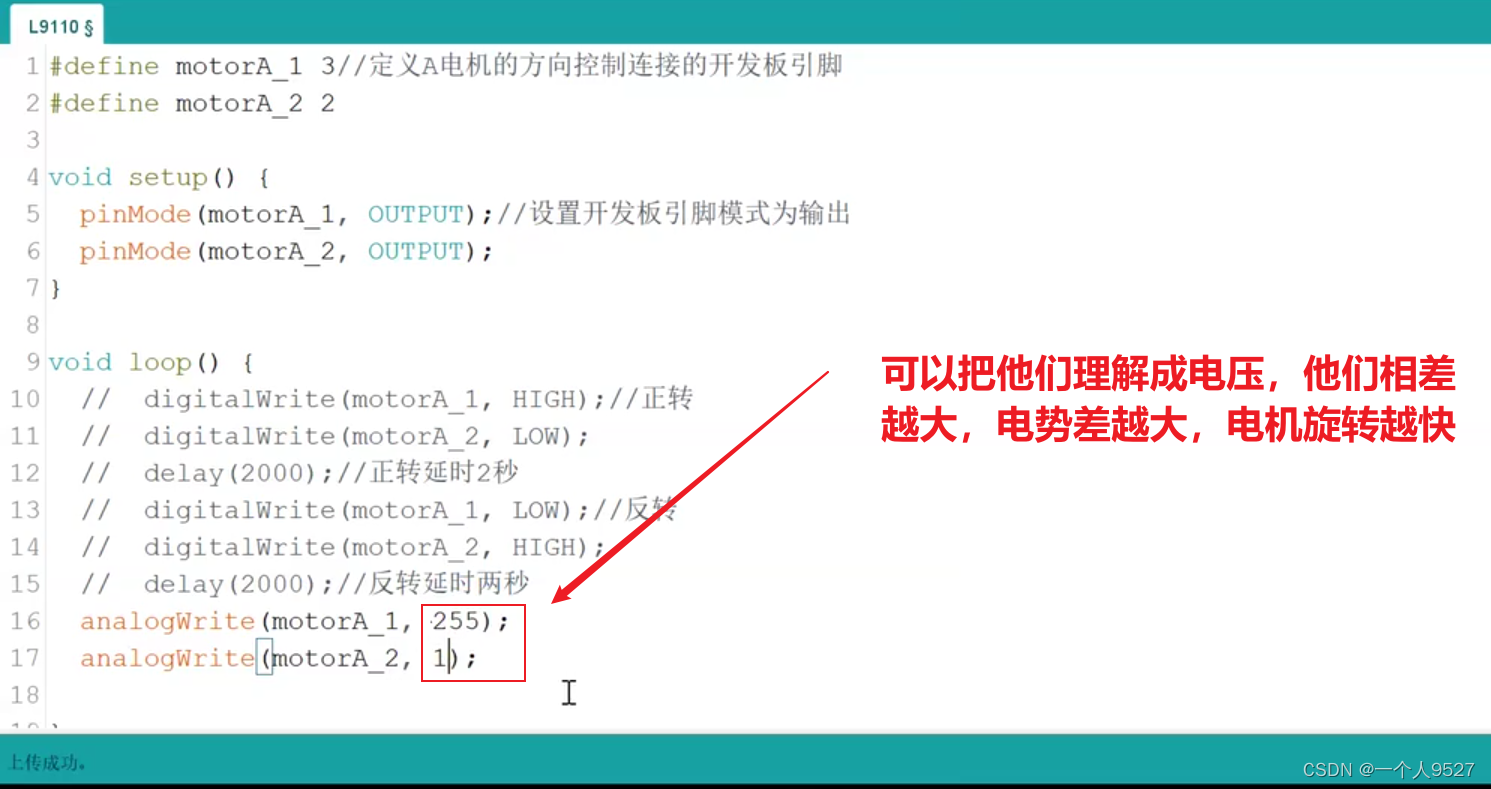
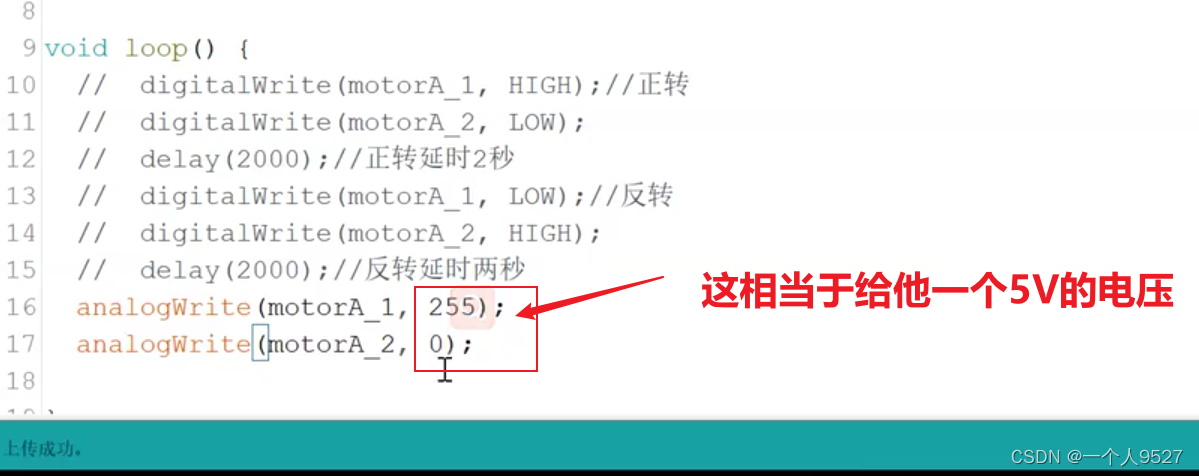
如果这个模拟值设置的太小了,电流小,电机可能不会旋转,或者需要拨动一下才会旋转。
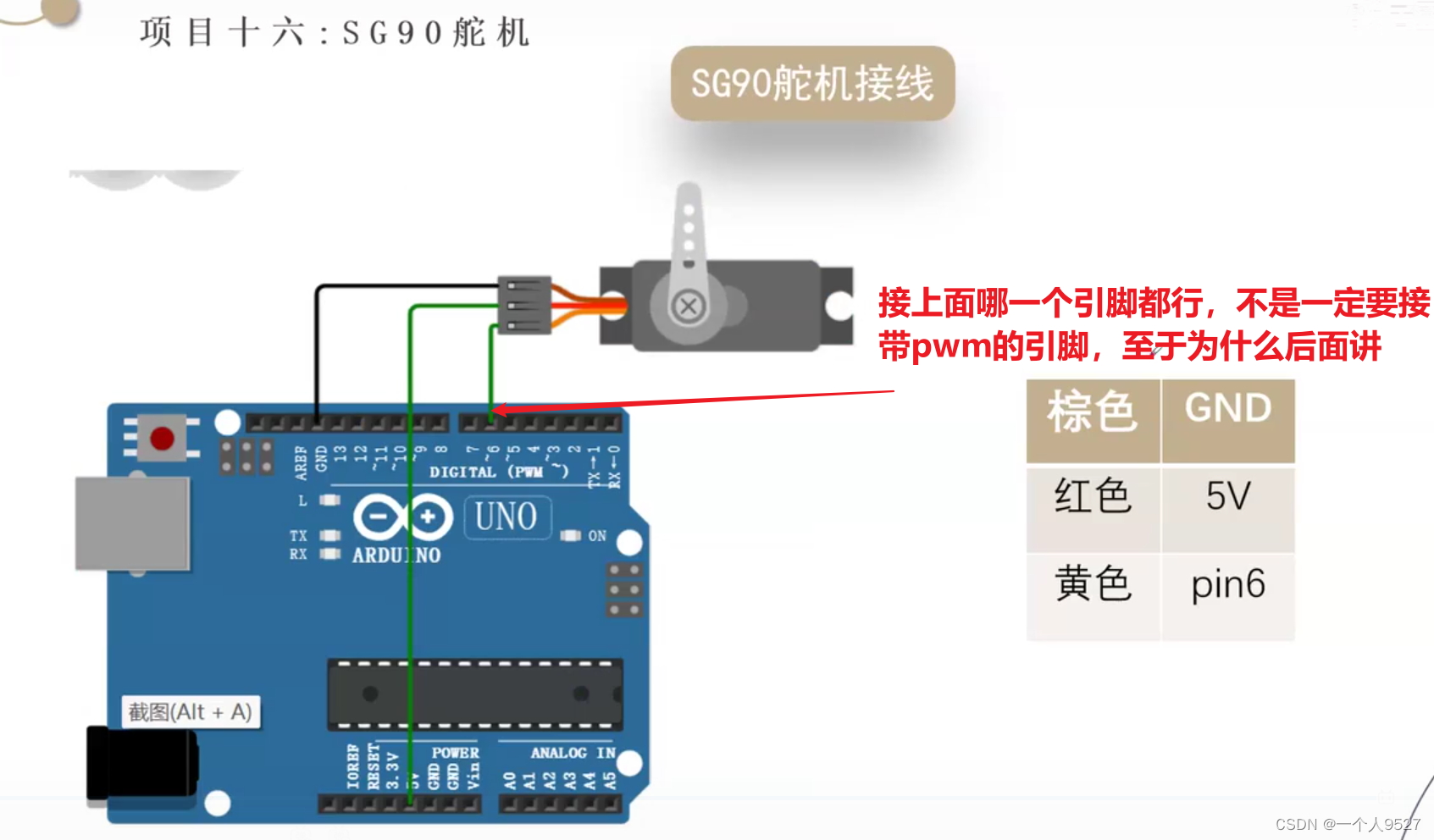
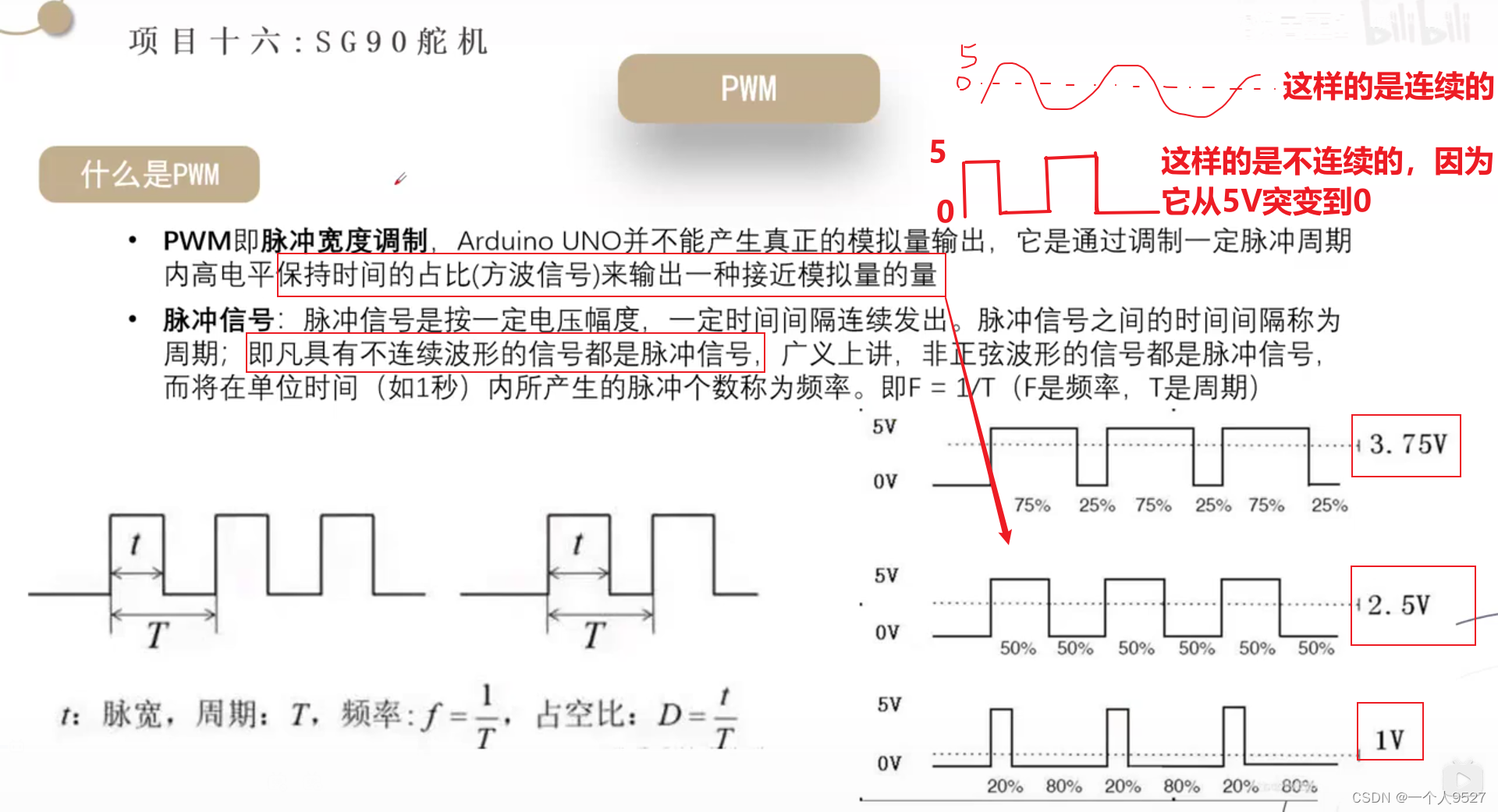
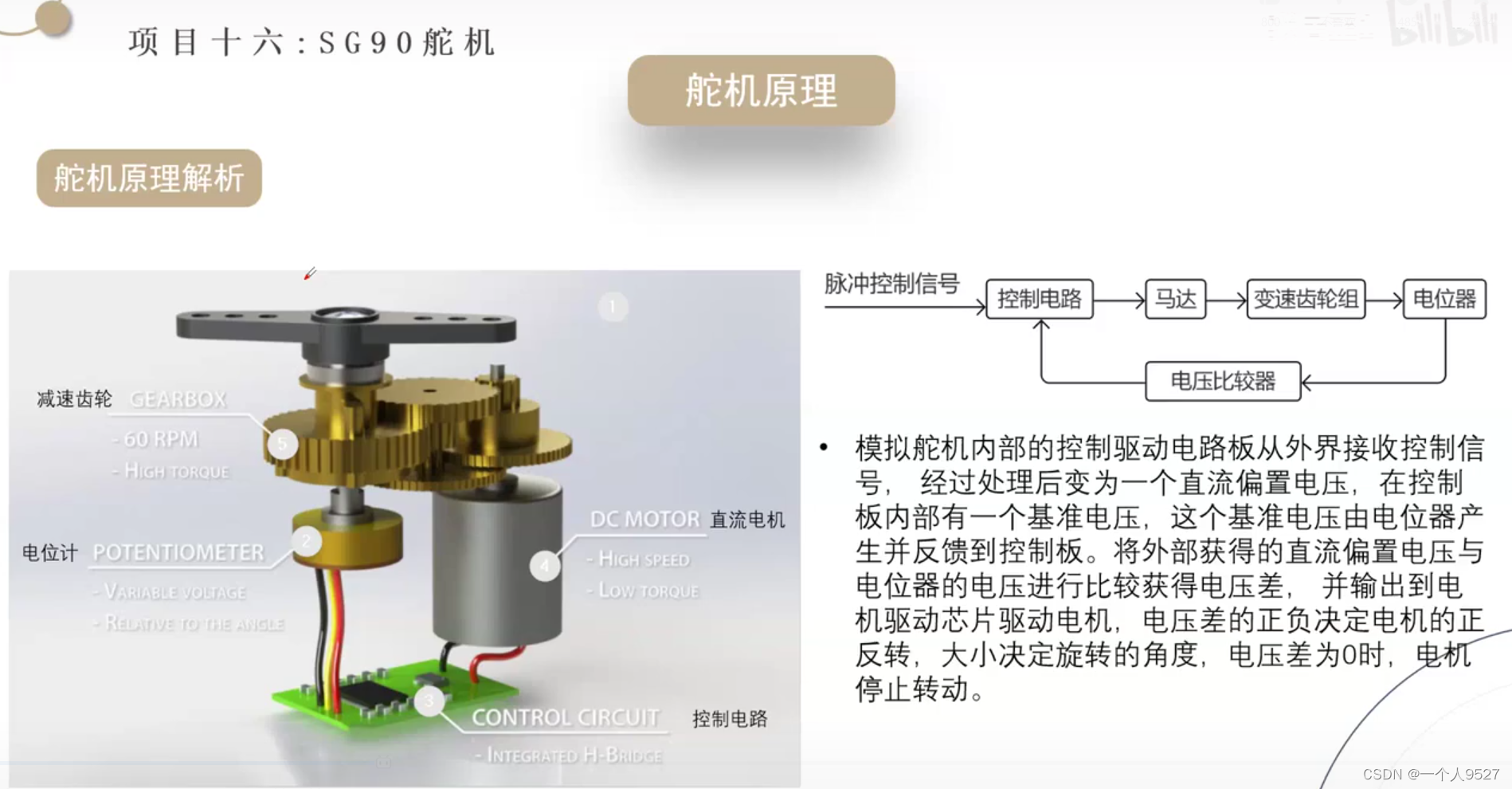
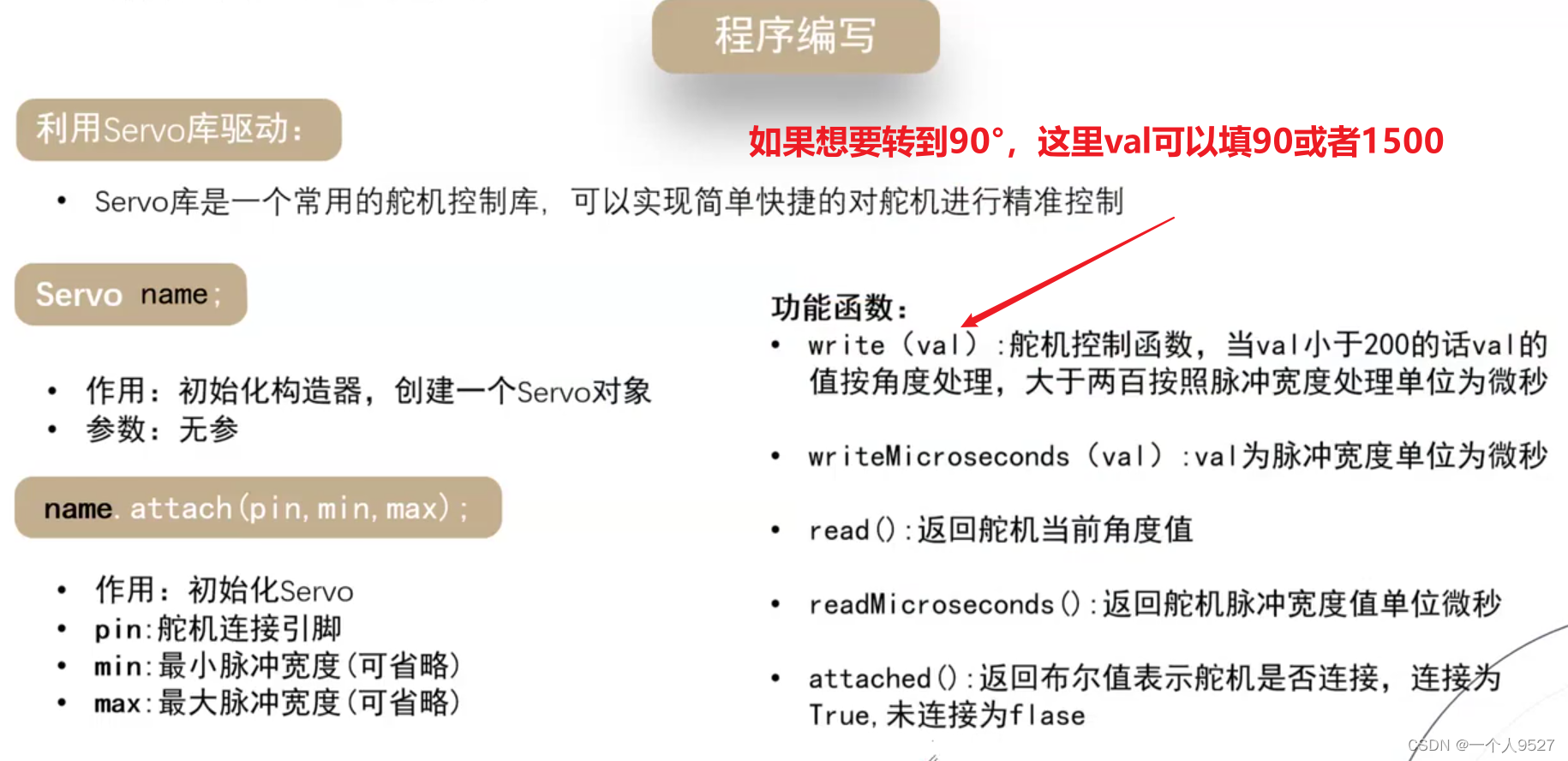
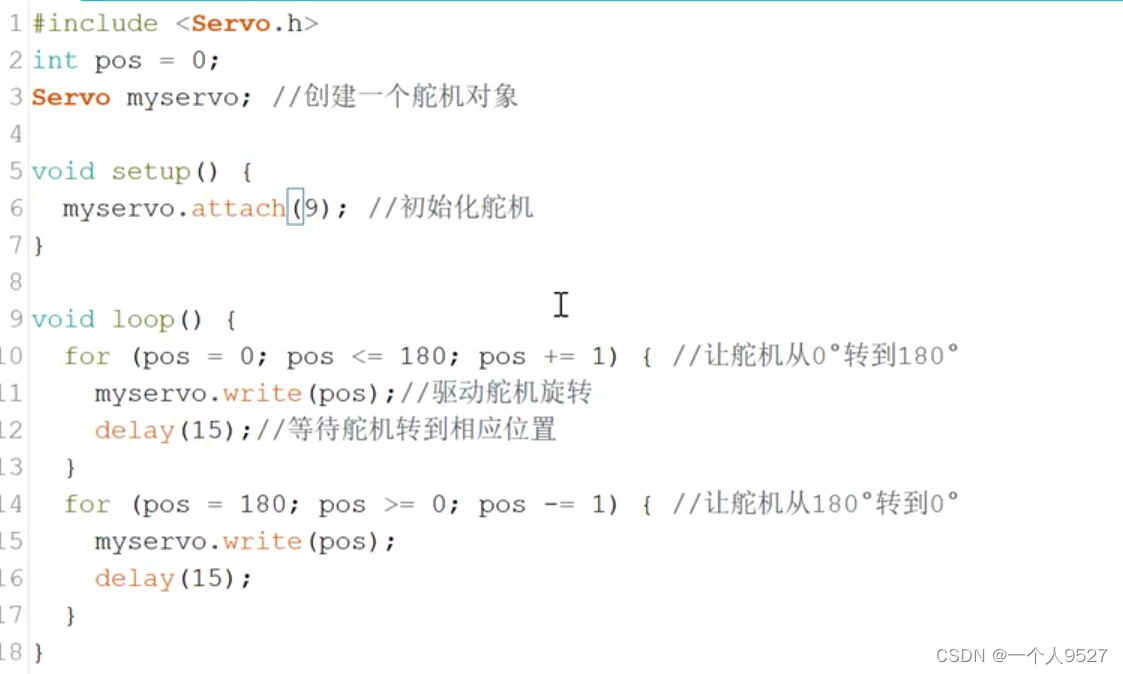
SG90舵机
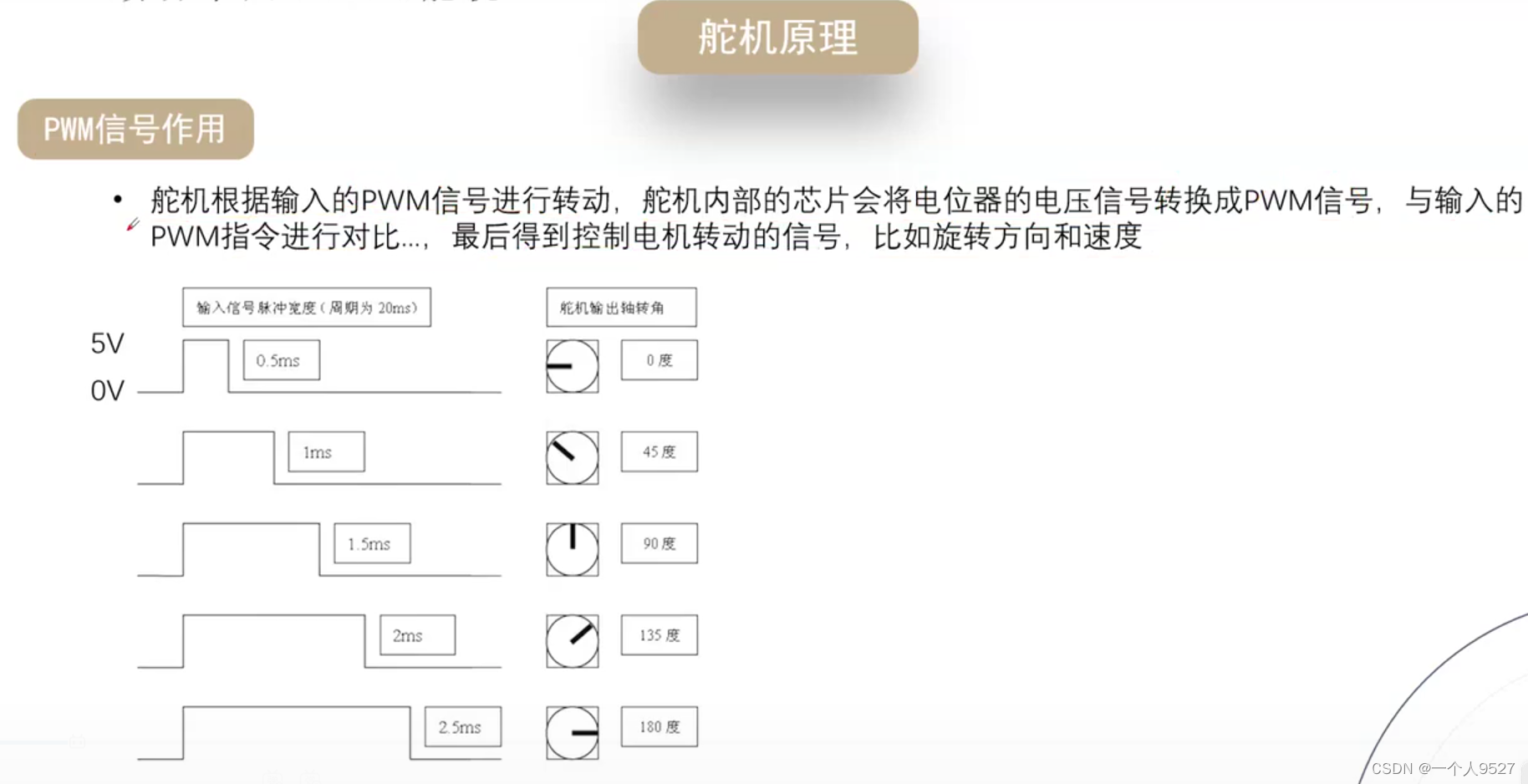
highTime是旋转的角度,period是固定周期,不变的;
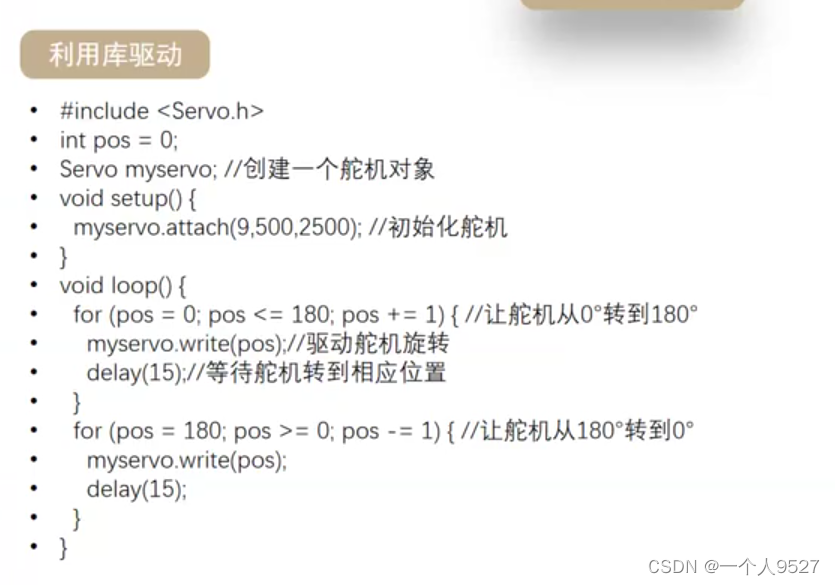
max,min尽量填,如果不填可能会旋转的角度不精准。
发现旋转不到180°,因为max,min没有填。
从0°转到180°,再从180°转到0°;
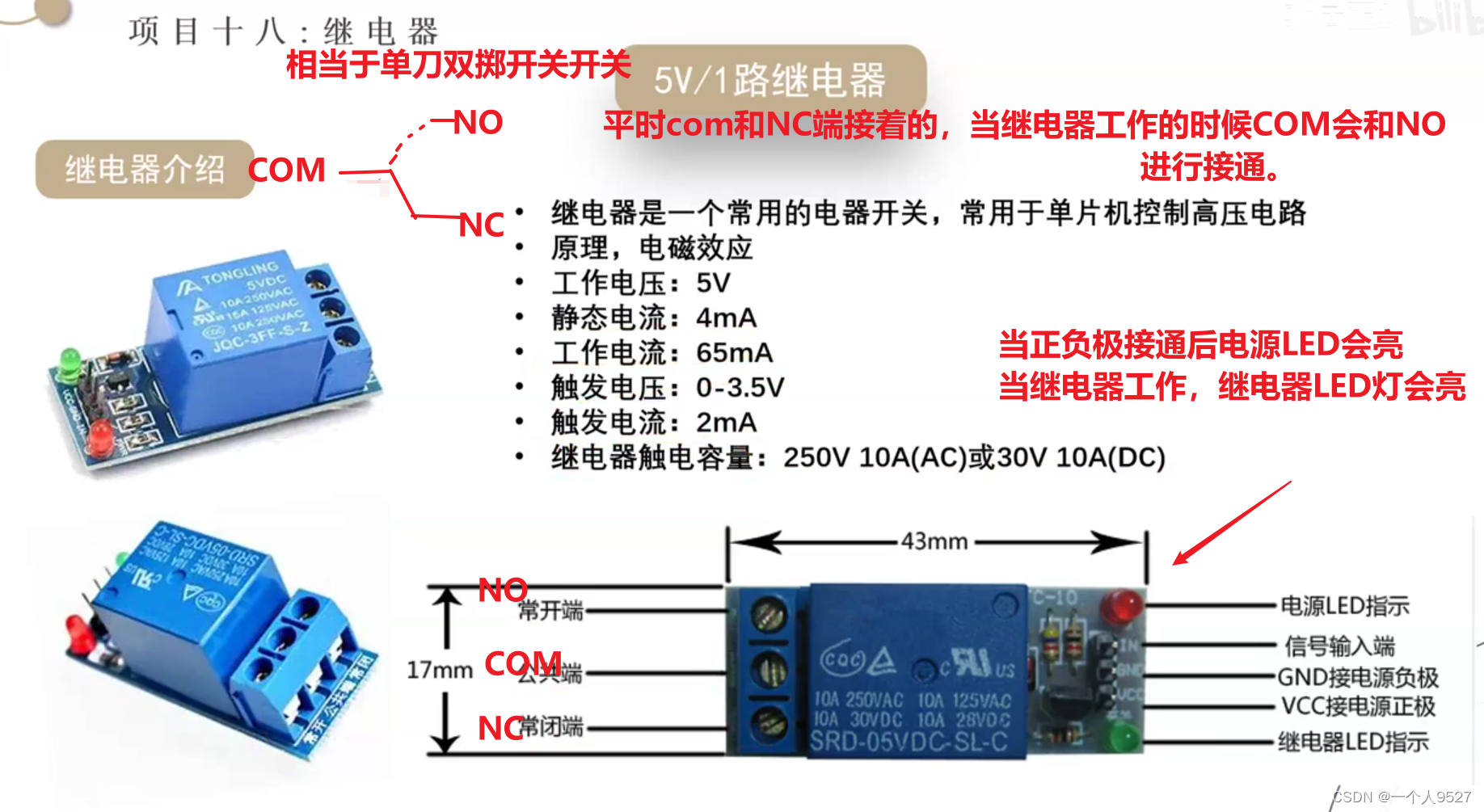
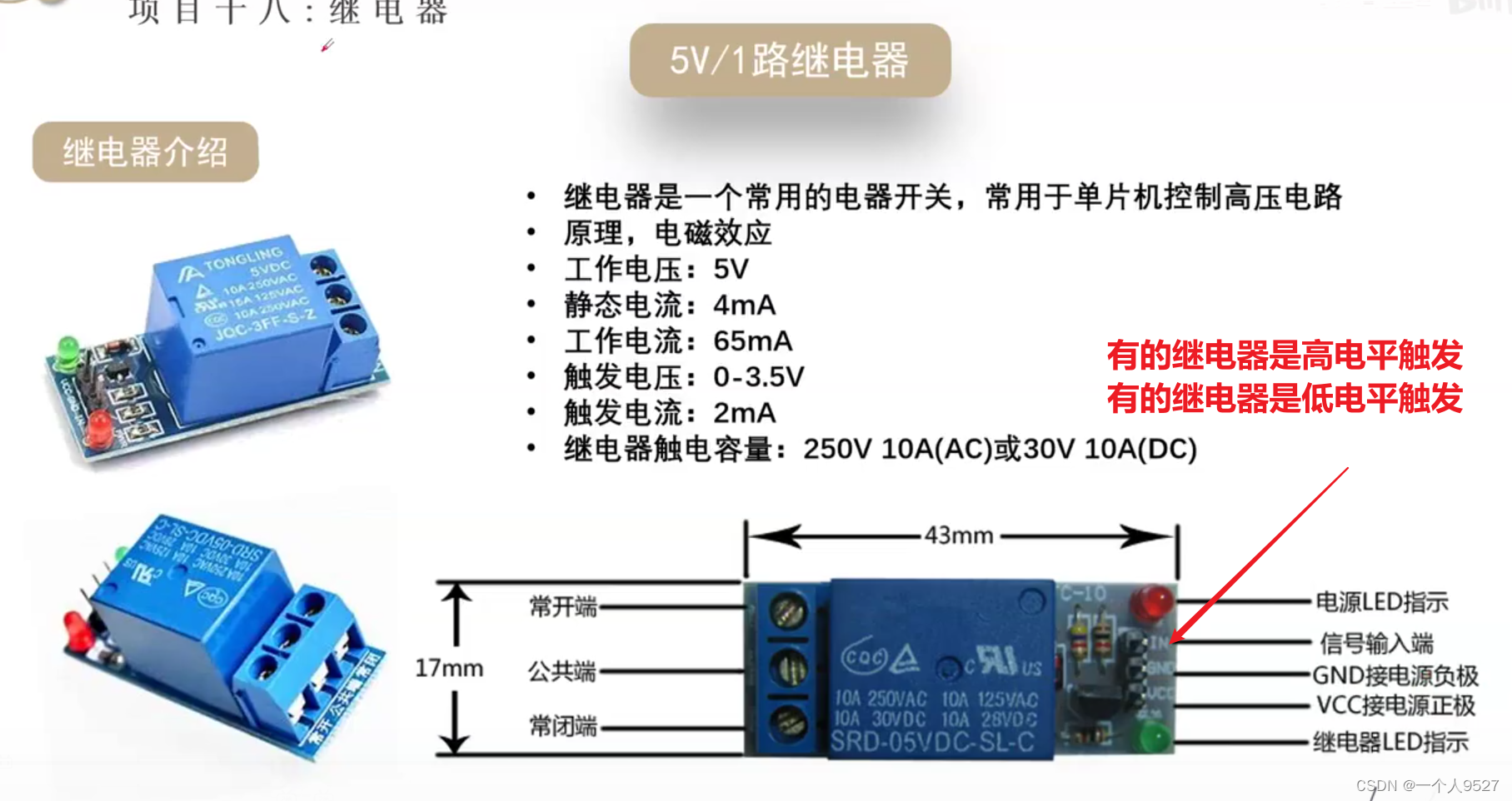
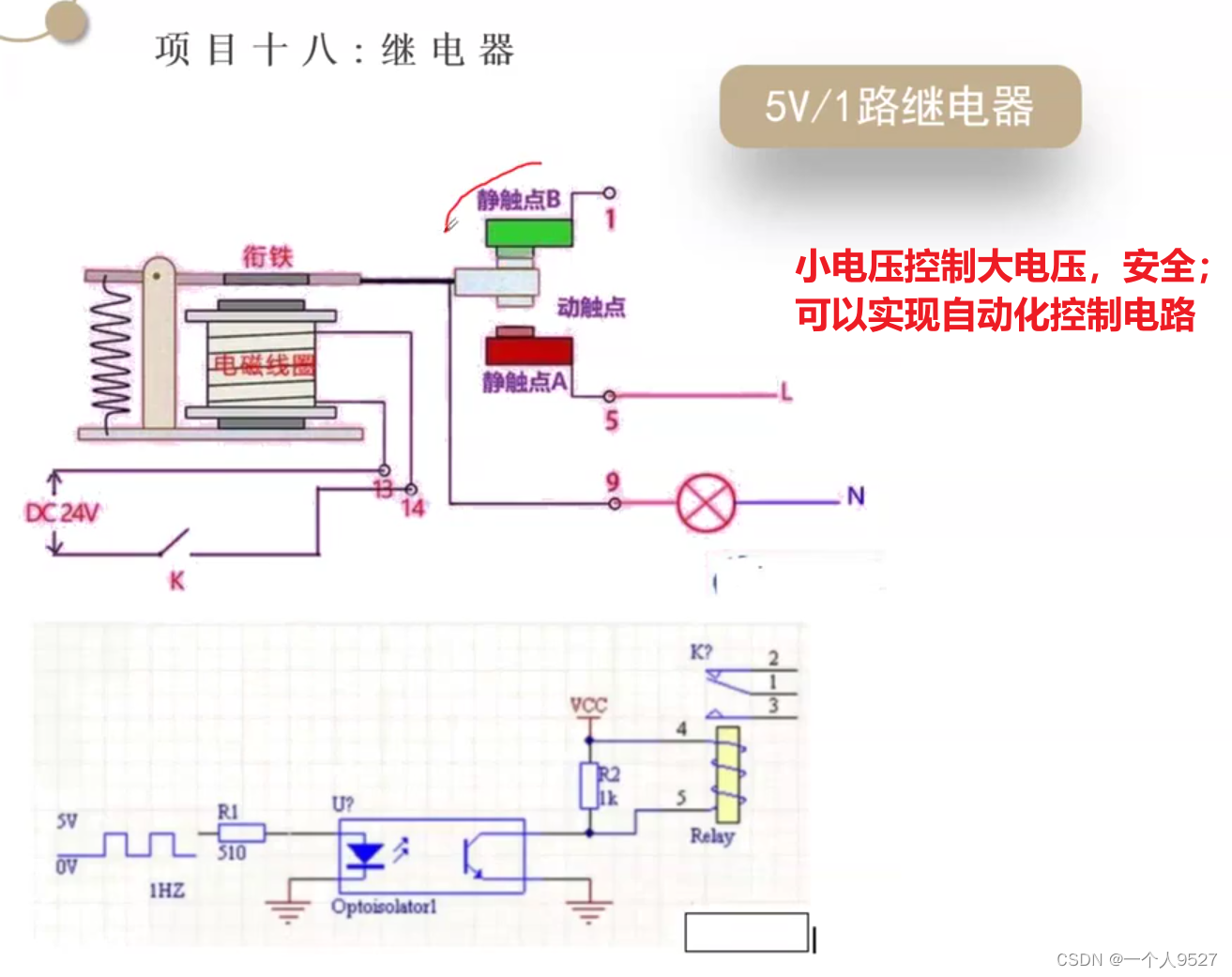
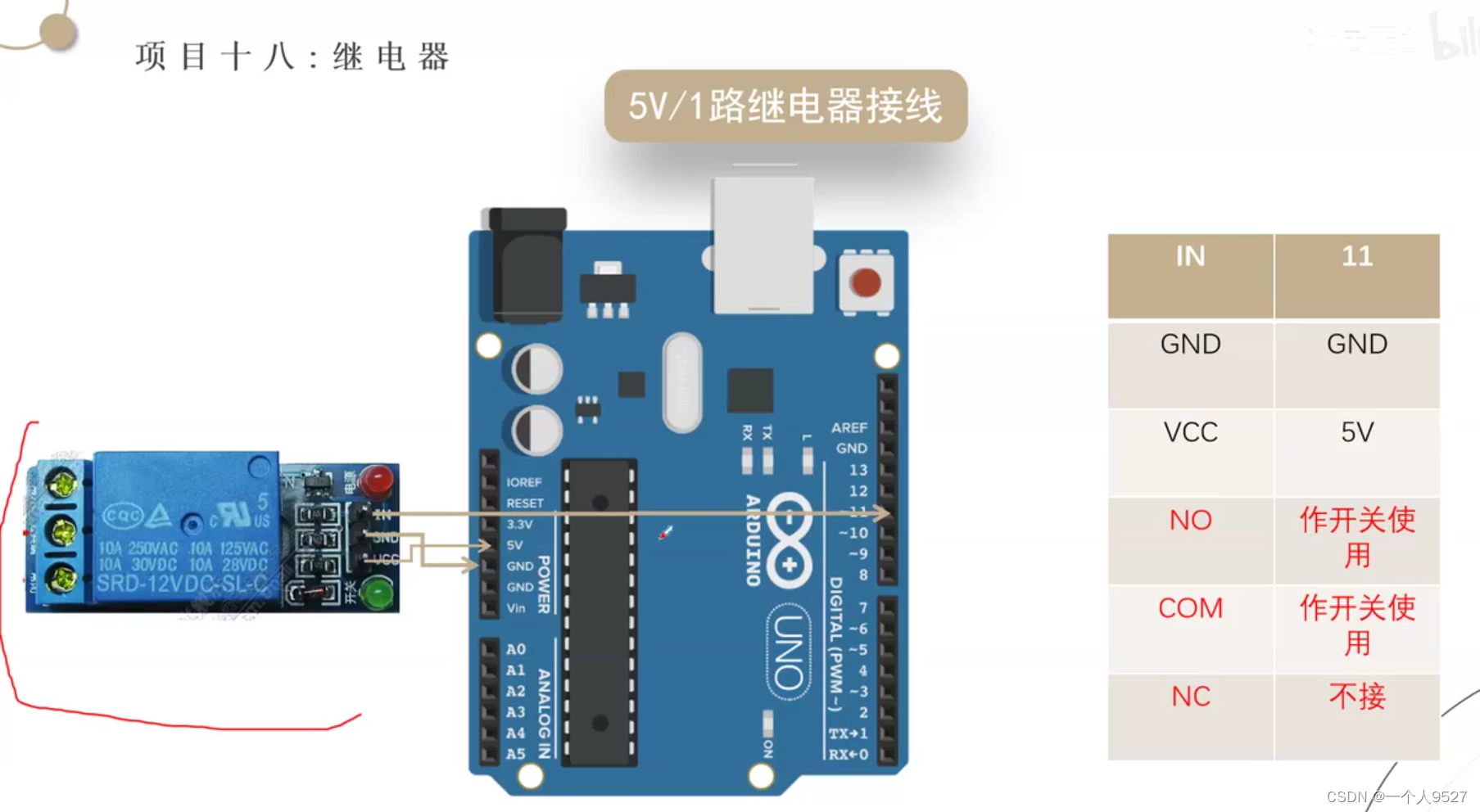
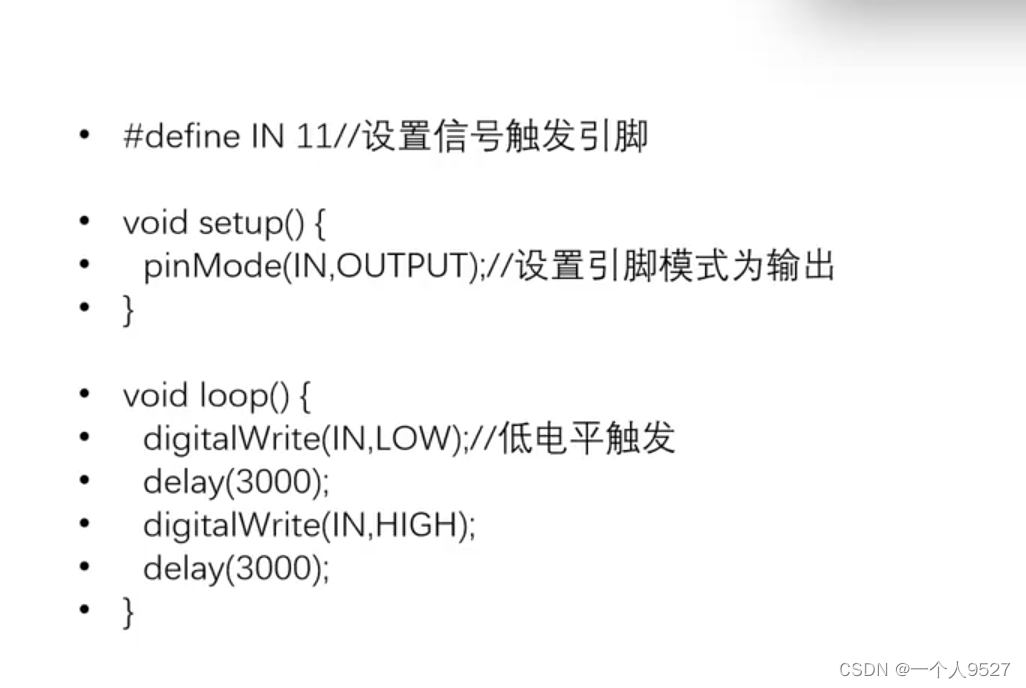
继电器
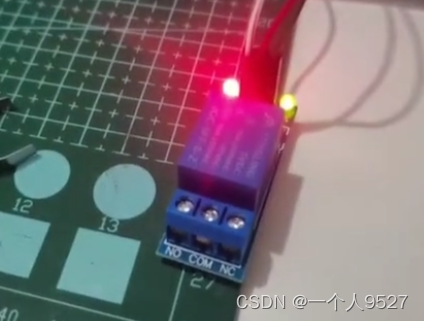
红灯一直亮,绿的灯亮三秒,灭三秒。










相关内容
热门资讯
铜仁市抹茶产业发展报告
抹茶起源于中国,兴起于隋唐时期。抹茶是采用覆盖栽培的茶树鲜叶经蒸汽(或热风)杀青后、干燥制成的叶片为...
鱼头:看破不说破,都在歌里玩人...
Nous厂牌OG鱼头晒出潇潇洒洒2025freestyle!这首味够正宗吗? “确实飞,但没味道,用...
原创 试...
昨天分享了甜品和甜汤的做法,今天再来一道硬菜,能够大口吃肉的菜肴,过年的时候必须炖上一锅,热气腾腾的...
非遗里的年味|嵌字豆糖:在方寸...
嵌字豆糖制作技艺 始于明清 是安徽省级非物质文化遗产 作为徽州传统特色非遗美食 嵌字豆糖 是当地人过...